Tarjeta gráfica
una placa o tarjeta gráfica, tarjeta de vídeo, tarjeta aceleradora de gráficos o adaptador de pantalla, es una tarjeta de expansión para una computadora, encargada de procesar los datos provenientes de la CPU y transformarlos en información comprensible y representable en un dispositivo de salida, como un monitor o televisor. Las tarjetas gráficas más comunes son las disponibles para las computadoras compatibles con la IBM PC, debido a la enorme popularidad de éstas, pero otras arquitecturas también hacen uso de este tipo de dispositivos.
Es habitual que se utilice el mismo término tanto a las habituales tarjetas dedicadas y separadas como a las GPU integradas en la placa base.
Algunas tarjetas gráficas han ofrecido funcionalidades añadidas como captura de vídeo, sintonización de TV, decodificación MPEG-2[1] y MPEG-4 o incluso conectores Firewire, de ratón, lápiz óptico o joystick.
Las tarjetas gráficas no son dominio exclusivo de los PC; contaron o cuentan con ellas dispositivos como los Commodore Amiga (conectadas mediante las ranuras Zorro II y Zorro III), Apple II, Apple Macintosh, Spectravideo SVI-328, equipos MSX y, por supuesto, en las videoconsolas modernas, como la Wii, la Playstation 3 y la Xbox360
La GPU
La GPU, —acrónimo de «graphics processing unit», que significa «unidad de procesamiento gráfico»— es un procesador (como la CPU) dedicado al procesamiento de gráficos; su razón de ser es aligerar la carga de trabajo del procesador central y, por ello, está optimizada para el cálculo en coma flotante, predominante en las funciones 3D. La mayor parte de la información ofrecida en la especificación de una tarjeta gráfica se refiere a las características de la GPU, pues constituye la parte más importante de la tarjeta. Dos de las más importantes de dichas características son la frecuencia de reloj del núcleo, que en 2006 oscilaba entre 250 MHz en las tarjetas de gama baja y 750 MHz en las de gama alta, y el número de pipelines (vertex y fragment shaders), encargadas de traducir una imagen 3D compuesta por vértices y líneas en una imagen 2D compuesta por píxeles.
Según la tarjeta gráfica esté integrada en la placa base (bajas prestaciones) o no, utilizará la memoria RAM propia del ordenador o dispondrá de una propia. Dicha memoria es la memoria de vídeo o VRAM. Su tamaño oscila entre 128 MB y 1 GB. La memoria empleada en 2006 estaba basada en tecnología DDR, destacando DDR2, GDDR3,GDDR4 y GDDR5. La frecuencia de reloj de la memoria se encontraba entre 400 MHz y 3,6 GHz.
Han conseguido hacer memorias GDDR5 a 7GHZ, gracias al proceso de reducción de 50 nm, permitiendo un gran ancho de banda en buses muy pequeños (incluso de 64 bits)
Una parte importante de la memoria de un adaptador de vídeo es el Z-Buffer, encargado de gestionar las coordenadas de profundidad de las imágenes en los gráficos 3D.
El RAMDAC
El RAMDAC es un conversor de [señal digitaldigital]] a analógico de memoria RAM. Se encarga de transformar las señales digitales producidas en el ordenador en una señal analógica que sea interpretable por el monitor. Según el número de bits que maneje a la vez y la velocidad con que lo haga, el conversor será capaz de dar soporte a diferentes velocidades de refresco del monitor (se recomienda trabajar a partir de 75 Hz, nunca con menos de 60).[9] Dada la creciente popularidad de los monitores digitales el RAMDAC está quedando obsoleto, puesto que no es necesaria la conversión analógica si bien es cierto que muchos conservan conexión VGA por compatibilida
Salidas SVGA, S-Video y DVI de una tarjeta gráfica
Los sistemas de conexión más habituales entre la tarjeta gráfica y el dispositivo visualizador (como un monitor o un televisor) son:
DA-15 conector RGB usado mayoritariamente en los Apple Macintosh
Digital TTL DE-9 : usado por las primitivas tarjetas de IBM (MDA, CGA y variantes, EGA y muy contadas VGA)
SVGA: estándar analógico de los años 1990; diseñado para dispositivos CRT, sufre de ruido eléctrico y distorsión por la conversión de digital a analógico y el error de muestreo al evaluar los píxeles a enviar al monitor.
DVI: sustituto del anterior, fue diseñado para obtener la máxima calidad de visualización en las pantallas digitales como los LCD o proyectores. Evita la distorsión y el ruido al corresponder directamente un píxel a representar con uno del monitor en la resolución nativa del mismo.
S-Video: incluido para dar soporte a televisores, reproductores de DVD, vídeos, y videoconsolas.
Otras no tan extendidas en 2007 son:
S-Video implementado sobre todo en tarjetas con sintonizador TV y/o chips con soporte de video NTSC/PAL
Vídeo Compuesto: analógico de muy baja resolución mediante conector RCA.
Vídeo por componentes: utilizado también para proyectores; de calidad comparable a la de SVGA, dispone de tres clavijas (Y, Cb y Cr).
HDMI: tecnología de audio y vídeo digital cifrado sin compresión en un mismo cable.
Extended Industry Standard Architecture
EISA.
El Extended Industry Standard Architecture (en inglés, Arquitectura Estándar Industrial Extendida), casi siempre abreviado EISA, es una arquitectura de bus para computadoras compatibles con el IBM PC. Fue anunciado a finales de 1988 y desarrollado por el llamado "Grupo de los Nueve" (AST, Compaq, Epson, Hewlett-Packard, NEC Corporation, Olivetti, Tandy, Wyse y Zenith Data Systems), vendedores de computadores clónicos como respuesta al uso por parte de IBM de su arquitectura propietaria MicroChannel (MCA) en su serie PS/2. Tuvo un uso limitado en computadores personales 386 y 486 hasta mediados de los años 1990, cuando fue reemplazado por los buses locales tales como el bus local VESA y el PCI
EISA amplía la arquitectura de bus ISA a 32 bits y permite que más de una CPU comparta el bus. El soporte de bus mastering también se mejora para permitir acceso hasta a 4 GB de memoria. A diferencia de MCA, EISA es compatible de forma descendente con ISA, por lo que puede aceptar tarjetas antiguas XT e ISA, siendo conexiones y las ranuras una ampliación de las del bus ISA.
A pesar de ser en cierto modo inferior a MCA, el estándar EISA fue muy favorecido por los fabricantes debido a la naturaleza propietaria de MCA, e incluso IBM fabricó algunas máquinas que lo soportaban. Pero en el momento en el que hubo una fuerte demanda de un bus de estas velocidades y prestaciones, el bus local VESA y posteriormente el PCI llenaron este nicho y el EISA desapareció en la oscuridad.
EISA introduce las siguientes mejoras sobre ISA:
Direcciones de memoria de 32 bits para CPU, DMA, y dispositivos de bus master.
Protocolo de transmisión síncrona para transferencias de alta velocidad.
Traducción automática de ciclos de bus entre maestros y esclavos EISA e ISA.
Soporte de controladores de periféricos maestros inteligentes.
33 MB/s de velocidad de transferencia para buses maestros y dispositivos DMA
Interrupciones compartidas .
ISA
Se creó como un sistema de 8 bits en el IBM PC en 1980, y se extendió en 1983 como el XT bus architecture. El nuevo estándar de 16 bits se introduce en 1984 y se le llama habitualmente AT bus architecture. Diseñado para conectar tarjetas de ampliación a la placa madre, el protocolo también permite el bus mastering aunque sólo los primeros 16 MiB de la memoria principal están disponibles para acceso directo. El bus de 8 bits funciona a 4,77 MHz (la misma velocidad que el procesador Intel 8088 empleado en el IBM PC), mientras que el de 16 bits opera a 8 MHz (el de Intel 80286 del IBM AT). Está también disponible en algunas máquinas que no son compatibles IBM PC, como el AT&T Hobbit (de corta historia), los Commodore Amiga 2000 y los BeBox basados en PowerPC. Físicamente, el slot XT es un conector de borde de tarjeta de 62 contactos (31 por cara) y 8,5 centímetros, mientras que el AT se añade un segundo conector de 36 contactos (18 por cara), con un tamaño de 14 cm. Ambos suelen ser en color negro. Al ser retro compatibles, puede conectarse una tarjeta XT en un slot AT sin problemas, excepto en placas mal diseñadas.
En 1987, IBM comienza a reemplazar el bus ISA por su bus propietario MCA (Micro Channel Architecture) en un intento por recuperar el control de la arquitectura PC y con ello del mercado PC. El sistema es mucho más avanzado que ISA, pero incompatible física y lógicamente, por lo que los fabricantes de ordenadores responden con el Extended Industry Standard Architecture (EISA) y posteriormente con el VESA Local Bus (VLB). De hecho, VLB usa algunas partes originalmente diseñados para MCA debido a que los fabricantes de componentes ya tienen la habilidad de fabricarlos. Ambos son extensiones compatibles con el estándar ISA.
Los usuarios de máquinas basadas en ISA tenían que disponer de información especial sobre el hardware que iban a añadir al sistema. Aunque un puñado de tarjetas eran esencialmente Plug-and-play (enchufar y listo), no era lo habitual. Frecuentemente había que configurar varias cosas al añadir un nuevo dispositivo, como la IRQ, las direcciones de entrada/salida, o el canal DMA. MCA había resuelto esos problemas, y actualmente PCI incorpora muchas de las ideas que nacieron con MCA (aunque descienden más directamente de EISA).
Estos problema con la configuración llevaron a la creación de ISA PnP, un sistema Plug-and-play que usa una combinación de modificaciones al hardware, la BIOS del sistema, y el software del sistema operativo que automáticamente maneja los detalles más gruesos. En realidad, ISA PnP acabó convirtiéndose en un dolor de cabeza crónico, y nunca fue bien soportado excepto al final de la historia de ISA. De ahí proviene la extensión de la frase sarcástica "plug-and-pray" (enchufar y rezar).
Los slots PCI fueron el primer puerto de expansión físicamente incompatible con ISA que lograron expulsarla de la placa madre. Al principio, las placas base eran en gran parte ISA, incluyendo algunas ranuras del PCI. Pero a mitad de los 90, los dos tipos de slots estaban equilibrados, y al poco los ISA pasaron a ser minoría en los ordenadores de consumo. Las especificaciones PC 97 de Microsoft recomendaban que los slots ISA se retiraran por completo, aunque la arquitectura del sistema todavía requiera de ISA en modo residual para direccionar las lectoras de disquete, los puertos RS-232, etc. Los slots ISA permanecen por algunos años más y es posible ver placas con un slot Accelerated Graphics Port (AGP) justo al lado de la CPU, una serie de slots PCI, y uno o dos slots ISA cerca del borde.
Es también notable que los slots PCI están "rotados" en comparación con los ISA. Los conectores externos y la circuitería principal de ISA están dispuestos en el lado izquierdo de la placa, mientras que los de PCI lo están en el lado derecho, siempre mirando desde arriba. De este modo ambos slots podían estar juntos, pudiendo usarse sólo uno de ellos, lo que exprimía la placa madre.
El ancho de banda máximo del bus ISA de 16 bits es de 16 Mbyte/segundo. Este ancho de banda es insuficiente para las necesidades actuales, tales como tarjetas de vídeo de alta resolución, por lo que el bus ISA no se emplea en los PC modernos (2004), en los que ha sido sustituido por el bus PCI.
La arquitectura XT es una arquitectura de bus de 8 bits usada en los PC con procesadores Intel 8086 y 8088, como los IBM PC e IBM PC XT en los 80. Precede al la arquitectura AT de 16 bits usada en las máquinas compatibles IBM Personal Computer/AT.
El bus XT tiene cuatro canales DMA, de los que tres están en los slots de expansión. De esos tres, dos están normalmente asignados a funciones de la máquina:
VESA: Con el fin de desarrollar pantallas y tarjetas con una resolución superior a la ofrecida por VGA, en el año 1989 nace VESA ( Video Electronics Standards Association o Asociación para estándares electrónicos y de video) a finales de los años 80. Este tipo de tarjetas (y puertos) permite una mayor velocidad que el puerto ISA, siendo utilizado como puerto de alta velocidad para gráficas hasta la aparición de los puertos PCI. Con un bus de 32 bits, una frecuencia de 33 Mhz y un ancho de banda de 160 Mb/s permite resoluciones de 800x600, ampliando notablemente la cantidad de colores a mostrar (se abandona el sistema de paleta y se empieza a definir el sistema de profundidad de color, que permite millones de colores). Uno de los mayores inconvenientes de este sistema era el tamaño de las tarjetas, que superaban los 30cm de longitud. Peripheral Component Interconnect
Un Peripheral Component Interconnect (PCI, "Interconexión de Componentes Periféricos") consiste en un bus de ordenador estándar para conectar dispositivos periféricos directamente a su placa base. Estos dispositivos pueden ser circuitos integrados ajustados en ésta (los llamados "dispositivos planares" en la especificación PCI) o tarjetas de expansión que se ajustan en conectores. Es común en PC, donde ha desplazado al ISA como bus estándar, pero también se emplea en otro tipo de ordenadores.
A diferencia de los buses ISA, el bus PCI permite configuración dinámica de un dispositivo periférico. En el tiempo de arranque del sistema, las tarjetas PCI y el BIOS interactúan y negocian los recursos solicitados por la tarjeta PCI. Esto permite asignación de IRQs y direcciones del puerto por medio de un proceso dinámico diferente del bus ISA, donde las IRQs tienen que ser configuradas manualmente usando jumpers externos. Las últimas revisiones de ISA y el bus MCA de IBM ya incorporaron tecnologías que automatizaban todo el proceso de configuración de las tarjetas, pero el bus PCI demostró una mayor eficacia en tecnología "plug and play". Aparte de esto, el bus PCI proporciona una descripción detallada de todos los dispositivos PCI conectados a través del espacio de configuración PCI.
La especificación PCI cubre el tamaño físico del bus, características eléctricas, cronómetro del bus y sus protocolos. El grupo de interés especial de PCI (PCI Special Interest Group)
Accelerated Graphics Port
AGP
Accelerated Graphics Port (AGP, Puerto de Gráficos Acelerado, en ocasiones llamado Advanced Graphics Port, Puerto de Gráficos Avanzado) es un puerto (puesto que sólo se puede conectar un dispositivo, mientras que en el bus se pueden conectar varios) desarrollado por Intel en 1996 como solución a los cuellos de botella que se producían en las tarjetas gráficas que usaban el bus PCI. El diseño parte de las especificaciones del PCI 2.1.
El puerto AGP es de 32 bit como PCI pero cuenta con notables diferencias como 8 canales más adicionales para acceso a la memoria RAM. Además puede acceder directamente a esta a través del puente norte pudiendo emular así memoria de vídeo en la RAM. La velocidad del bus es de 66 MHz.
El bus AGP cuenta con diferentes modos de funcionamiento.
AGP 1X: velocidad 66 MHz con una tasa de transferencia de 266 MB/s y funcionando a un voltaje de 3,3V.
AGP 2X: velocidad 133 MHz con una tasa de transferencia de 532 MB/s y funcionando a un voltaje de 3,3V.
AGP 4X: velocidad 266 MHz con una tasa de transferencia de 1 GB/s y funcionando a un voltaje de 3,3 o 1,5V para adaptarse a los diseños de las tarjetas gráficas.
AGP 8X: velocidad 533 MHz con una tasa de transferencia de 2 GB/s y funcionando a un voltaje de 0,7V o 1,5V.
Estas tasas de transferencias se consiguen aprovechando los ciclos de reloj del bus mediante un multiplicador pero sin modificarlos físicamente..
El puerto AGP se utiliza exclusivamente para conectar tarjetas gráficas, y debido a su arquitectura sólo puede haber una ranura. Dicha ranura mide unos 8 cm y se encuentra a un lado de las ranuras PCI.
A partir de 2006, el uso del puerto AGP ha ido disminuyendo con la aparición de una nueva evolución conocida como PCI-Express, que proporciona mayores prestaciones en cuanto a frecuencia y ancho de banda. Así, los principales fabricantes de tarjetas gráficas, como ATI y nVIDIA, han ido presentando cada vez menos productos para este puerto.
PCI-Express
PCI Express (anteriormente conocido por las siglas 3GIO, en el caso de las "Entradas/Salidas de Tercera Generación", en inglés: 3rd Generation I/O) es un nuevo desarrollo del bus PCI que usa los conceptos de programación y los estándares de comunicación existentes, pero se basa en un sistema de comunicación serie mucho más rápido. Este sistema es apoyado principalmente por Intel, que empezó a desarrollar el estándar con nombre de proyecto Arapahoe después de retirarse del sistema Infiniband.
PCI Express es abreviado como PCI-E o PCIe, aunque erróneamente se le suele abreviar como PCI-X o PCIx. Sin embargo, PCI Express no tiene nada que ver con PCI-X que es una evolución de PCI, en la que se consigue aumentar el ancho de banda mediante el incremento de la frecuencia, llegando a ser 32 veces más rápido que el PCI 2.1. Su velocidad es mayor que PCI-Express, pero presenta el inconveniente de que al instalar más de un dispositivo la frecuencia base se reduce y pierde velocidad de transmisión.
lunes, 26 de octubre de 2009
martes, 20 de octubre de 2009
EL SONIDO
Sonido
El sonido, en física, es cualquier fenómeno que involucre la propagación en forma de ondas elásticas (sean audibles o no), generalmente a través de un fluido (u otro medio elástico) que este generando el movimiento vibratorio de un cuerpo.
El sonido humanamente audible consiste en ondas sonoras consistentes en oscilaciones de la presión del aire, que son convertidas en ondas mecánicas en el oído humano y percibidas por el cerebro. La propagación del sonido es similar en los fluidos, donde el sonido toma la forma de fluctuaciones de presión. En los cuerpos sólidos la propagación del sonido involucra variaciones del estado tensional del medio.
Representación esquemática del oido. (Azul: ondas sonoras. Rojo: tímpano. Amarillo: Cóclea. Verde: células de receptores auditivos. Purpura: espectro de frecuencia de respuesta de lo oído. Naranja: impulso del nervio.)
La propagación del sonido involucra transporte de energía sin transporte de materia, en forma de ondas mecánicas que se propagan a través de la materia sólida, líquida o gaseosa. Como las vibraciones se producen en la misma dirección en la que se propaga el sonido, se trata de una onda longitudinal.
Física del sonido
La física del sonido es estudiada por la acústica, que trata tanto de la propagación de las ondas sonoras en los diferentes tipos de medios continuos como la interacción de estas ondas sonoras con los cuerpos físicos.
onda sinusoidal; Variación de frecuencia; Abajo podemos ver las frecuencias más altas. El eje horizontal representa el tiempo.
Propagación del sonido
Ciertas características de los fluidos y de los sólidos influyen en la onda de sonido. Es por eso que el sonido se propaga en los sólidos y en los líquidos con mayor rapidez que en los gases. En general cuanto mayor sea la compresibilidad (1/K) del medio tanto menor es la velocidad del sonido. También la densidad es un factor importante en la velocidad de propagación, en general a mayor sea la densidad (ρ), a igualdad de todo lo demás, tanto menor es la velocidad de la propagación del sonido. La velocidad del sonido se relaciona con esas magnitudes mediante:
En los gases, la temperatura influye tanto la compresibilidad como la densidad, de tal manera que el factor de importancia suele ser la temperatura misma.
Para que el sonido se transmita se necesita que las moléculas vibren en torno a sus posiciones de equilibrio.
En algunas zonas de las moléculas de aire, al vibrar se juntan (zonas de compresion)y en otras zonas se alejan (zonas de rarefaccion),esta alteracion de las moléculas de aire es lo que produce el sonido.
Magnitudes físicas del sonido
Como todo movimiento ondulatorio, el sonido puede representarse como una suma de curvas sinusoides con un factor de amplitud, que se pueden caracterizar por las mismas magnitudes y unidades de medida que a cualquier onda de frecuencia bien definida: Longitud de onda (λ), frecuencia (f) o inversa del período (T), amplitud que indica la cantidad de energía que contiene una señal sonora) y no hay que confundir amplitud con volumen o potencia acústica. Y finalmente cuando se considera la superposición de diferentes ondas es importante la fase que representa el retardo relativo en la posición de una onda con respecto a otra.
Sin embargo, un sonido complejo cualquiera no está caracterizado por los parámetros anteriores, ya que en general un sonido cualquiera es una combinación de ondas sonoras que difieren en los cinco parámetros anteriores. La caracterización de un sonido arbitrariamente complejo implica analizar tanto la energía transmitida como la distribución de dicha energía entre las diversas ondas componentes, para ello resulta útil investigar:
Potencia acústica: El nivel de potencia acústica es la cantidad de energía radiada en forma de ondas por unidad de tiempo por una fuente determinada. La potencia acústica depende de la amplitud.
Espectro de frecuencias: que permite conocer en qué frecuencias se transmite la mayor parte de la energía.
Velocidad del sonido
El sonido tiene una velocidad de 331,5 m/s cuando: la temperatura es de 0 °C, la presión atmosférica es de 1 atm (nivel del mar) y se presenta una humedad relativa del aire de 0 % (aire seco). Aunque depende muy poco de la presión del aire.
La velocidad del sonido depende del tipo de material. Cuando el sonido se desplaza en los sólidos tiene mayor velocidad que en los líquidos, y en los líquidos es más veloz que en los gases. Esto se debe a que las partículas en los sólidos están más cercanas.
U.S. Navy F/A-18 Avión rompiendo la barrera del sonido.
Comportamiento de las ondas de sonido a diferentes velocidades
La velocidad del sonido se puede calcular en relación a la temperatura de la siguiente manera:
Donde:
, es la temperatura en grados Celsius.
Si la temperatura ambiente es de 15 °C, la velocidad de propagación del sonido es 340 m/s (1224 km/h ). Este valor corresponde a 1 MACH.
Reverberación
La reverberación es la suma total de las reflexiones del sonido que llegan al lugar del oyente en diferentes momentos del tiempo. Auditivamente se caracteriza por una prolongación, a modo de "colasonora", que se añade al sonido original. La duración y la coloración tímbrica de esta cola dependen de: La distancia entre el oyente y la fuente sonora; la naturaleza de las superficies que reflejan el sonido. En situaciones naturales hablamos de sonido directo para referirnos al sonido que se transmite directamente desde la fuente sonora hasta nosotros (o hasta el mecanismo de captación que tengamos). Por otra parte, el sonido reflejado es el que percibimos después de que haya rebotado en las superficies que delimitan el recinto acústico, o en los objetos que se encuentren en su trayectoria. Evidentemente, la trayectoria del sonido reflejado siempre será más larga que la del sonido directo, de manera que -temporalmente- escuchamos primero el sonido seco, y unos instantes más tarde escucharemos las primeras reflexiones (early reflections); a medida que transcurre el tiempo las reflexiones que nos llegan son cada vez de menor intensidad, hasta que desparecen. Nuestra sensación, no obstante, no es la de escuchar sonidos separados, ya que el cerebro los integra en un único precepto, siempre que las reflexiones lleguen con una separación menor de unos 50 milisegundos. Esto es lo que se denomina efecto Haas o efecto de precedencia.ariel12
Fisiología del sonido
El aparato auditivo
Los sonidos son percibidos a través del aparato auditivo que recibe las ondas sonoras, que son convertidas en movimientos de los osteocillos óticos y percibidas en el oído interno que a su vez las transmite mediante el sistema nervioso al cerebro. Esta habilidad se tiene incluso antes de nacer[cita requerida].
La voz humana
La espectrografía de la voz humana revela su rico contenido armónico.
La voz humana se produce por la vibración de las cuerdas vocales, lo cual genera una onda sonora que es combinación de varias frecuencias y sus correspondientes armónicos. La cavidad buco-nasal sirve para crear ondas cuasiestacionarias por lo que ciertas frecuencias denominadas formantes. Cada segmento de sonido del habla viene caracterizado por un cierto espectro de frecuencias o distribución de la energía sonora en las diferentes frecuencias. El oído humano es capaz de identificar diferentes formantes de dicho sonido y percibir cada sonido con formantes diferentes como cualitativamente diferentes, eso es lo que permite por ejemplo distinguir dos vocales. Típicamente el primer formante, el de frecuencia más baja está relacionada con la abertura de la vocal que en última instancia está relacionada con la frecuencia de las ondas estacionarias que vibran verticalmente en la cavidad. El segundo formante está relacionado con la vibración el la dirección horizontal y está relacionado con si la vocal es anterior, central o posterior.
La voz masculina tiene un tono fundamental de entre 100 y 200 Hz, mientras que la voz femenina es más aguda, típicamente está entre 150 y 300 Hz. Las voces infantiles son aún más agudas. Sin el filtrado por resonancia que produce la cavidad buco nasal nuestras emisiones sonoras no tendrían la claridad necesaria para ser audibles. Ese proceso de filtrado es precisamente lo que permite generar los diversos formantes de cada unidad segmental del habla.
Sonidos del habla
Las lenguas humanas usan segmentos homogéneos reconocibles de unas decenas de milisegundos de duración, que componen los sonidos del habla, técnicamente llamados fonos. Lingüísticamente no todas las diferencias acústicas son relevantes, por ejemplo las mujeres y los niños tienen en general tonos más agudos, por lo que todos los sonidos que producen tienen en promedio una frecuencia fundamental y unos armónicos más altos.
Los hablantes competentes de una lengua aprenden a "clasificar" diferentes sonidos cualitativamente similares en clases de equivalencia de rasgos relevantes. Esas clases de equivalencia reconocidas por los hablantes son los constructos mentales que llamamos fonemas. La mayoría de lenguas naturales tiene unas pocas decenas de fonemas distintivos, a pesar de que las variaciones acústicas de los fonos y sonidos son enormes.
Resonancia
Es el fenómeno que se produce cuando los cuerpos vibran con la misma frecuencia, uno de los cuales se puso a vibrar al recibir las frecuencias del otro. Para entender el fenómeno de la resonancia existe un ejemplo muy sencillo, Supóngase que se tiene un tubo con agua y muy cerca de él (sin éstos en contacto) tenemos un diapasón, si golpeamos el diapasón con un metal, mientras echan agua en el tubo, cuando el agua alcance determinada altura el sonido será mas fuerte; esto se debe a que la columna de agua contenida en el tubo se pone a vibrar con la misma frecuencia que la que tiene el diapasón, lo que evidencia por qué las frecuencias se refuerzan y en consecuencia aumenta la intensidad del sonido. Un ejemplo podria ser el efecto de afinar las cuerdas de la guitarra, puesto que al afinar, lo que se hace es igualar las frecuencias, es decir poner en resnancia el sonido de las cuerdas.
El sonido en la música
El sonido, en combinación con el silencio, es la materia prima de la música. En música los sonidos se califican en categorías como: largos y cortos, fuertes y débiles, agudos y graves, agradables y desagradables. El sonido ha estado siempre presente en la vida cotidiana del hombre. A lo largo de la historia el ser humano ha inventado una serie de reglas para ordenarlo hasta construir algún tipo de lenguaje musical.
Propiedades
Altura: Indica si el sonido es grave o agudo, que depende de la frecuencia:
vibración lenta = baja frecuencia = sonido grave
vibración rápida = alta frecuencia = sonido agudo.
Duración: es el tiempo durante el cual se mantiene dicho sonido. Los únicos instrumentos acústicos que pueden mantener los sonidos el tiempo que quieran, son los de cuerda con arco como el violín por ejemplo, y los de viento (utilizando la respiración circular ó continua); pero por lo general, los de viento dependen de la capacidad pulmonar, y los de cuerda según el cambio del arco producido por el ejecutante.
Timbre o color : la voz propia de cada instrumento que distingue entre los sonidos y los ruidos
Intensidad o fuerza o potencia : lo fuerte o suave de un sonido :
1. fortissimo o muy fuerte 2. forte o fuerte 3. mezzoforte o medio fuerte 4. mezzopiano o medio suave 5. piano o suave 6. pianísimo o muy suave
Características o cualidades del sonido
Las cuatro cualidades básicas del sonido son:
La altura: viene determinada por la frecuencia fundamental de las ondas sonoras (es lo que permite distinguir entre sonidos graves, agudos o medios) medida en ciclos por segundo o hercios (Hz).
Para que los humanos podamos percibir un sonido, éste debe estar comprendido entre el rango de audición de 20 y 20.000 Hz. Por debajo de este rango tenemos los infrasonidos y por encima los ultrasonidos. A esto se le denomina rango de frecuencia audible. Cuanta más edad se tiene, este rango va reduciéndose tanto en graves como en agudos.
Véase también: Tono y altura (música)
La intensidad: es la cantidad de energía acústica que contiene un sonido. La intensidad viene determinada por la potencia, que a su vez está determinada por la amplitud y nos permite distinguir si el sonido es fuerte o débil.
Los sonidos que percibimos deben superar el umbral auditivo (0 dB) y no llegar al umbral de dolor (140 dB). Esta cualidad la medimos con el sonómetro y los resultados se expresan en decibelios (dB) en honor al científico e inventor Alexander Graham Bell.
En música se escriben así: ``piano pianissimo´´(ppp) mas suave que pianissimo, ``Pianissimo´´ (pp) Muy suave, ``Piano´´ (p) suave, ``Mezzo Piano´´ (mp) medio suave, ``Mezzo Forte´´ (mf) medio fuerte, ``Forte´´ (f) fuerte, ``Fortissimo´´ (ff) Muy fuerte, ``forte fortissimo´(fff) mas fuerte que fortissimo.
El timbre: es la cualidad que confiere al sonido los armónicos que acompañan a la frecuencia fundamental.
Esta cualidad es la que permite distinguir dos sonidos, por ejemplo, entre la misma nota (tono) con igual intensidad producida por dos instrumentos musicales distintos. Se define como la calidad del sonido. cada cuerpo sonoro vibra de una forma distinta. Las diferencias se dan no solamente por la naturaleza del cuerpo sonoro (madera, metal, piel tensada, etc), sino también por la manera de hacerlo sonar (golpear, frotar, rascar). Una misma nota suena distinta si la toca una flauta, un violín, una trompeta… cada instrumento tiene un timbre que lo identifica o lo diferencia de los demás. Con la voz sucede lo mismo. El sonido dado por un hombre, una mujer, un/a niño/a tienen distinto timbre. El timbre nos permitirá distinguir si la voz es áspera,dulce, ronca o aterciopelada. También influye en la variación del timbre la calidad del material que se utilice. Así pues, el sonido será claro, sordo, agradable o molesto.
La duración: es la cualidad que determina el tiempo de vibración de un objeto. Por ejemplo, podemos escuchar sonidos largos, cortos, muy cortos, etc. Es el tiempo durante el cual se mantiene un sonido, está determinada por la longitud, que indica el tamaño de una onda, que es la distancia entre el principio y el final de una onda completa (ciclo); según esto podemos decir que por duración los sonidos pueden ser largos o cortos.
CUALIDAD
CARACTERÍSTICA
RANGO
Altura
Frecuencia de onda
Agudo, medio, grave
Duración
Longitud de onda o tiempo de vibración
Largo o corto
Intensidad
Amplitud de onda
Fuerte, débil o suave
Timbre
Armónicos de onda o forma de la onda
Fuente emisora del sonido
El sonido, en física, es cualquier fenómeno que involucre la propagación en forma de ondas elásticas (sean audibles o no), generalmente a través de un fluido (u otro medio elástico) que este generando el movimiento vibratorio de un cuerpo.
El sonido humanamente audible consiste en ondas sonoras consistentes en oscilaciones de la presión del aire, que son convertidas en ondas mecánicas en el oído humano y percibidas por el cerebro. La propagación del sonido es similar en los fluidos, donde el sonido toma la forma de fluctuaciones de presión. En los cuerpos sólidos la propagación del sonido involucra variaciones del estado tensional del medio.
Representación esquemática del oido. (Azul: ondas sonoras. Rojo: tímpano. Amarillo: Cóclea. Verde: células de receptores auditivos. Purpura: espectro de frecuencia de respuesta de lo oído. Naranja: impulso del nervio.)
La propagación del sonido involucra transporte de energía sin transporte de materia, en forma de ondas mecánicas que se propagan a través de la materia sólida, líquida o gaseosa. Como las vibraciones se producen en la misma dirección en la que se propaga el sonido, se trata de una onda longitudinal.
Física del sonido
La física del sonido es estudiada por la acústica, que trata tanto de la propagación de las ondas sonoras en los diferentes tipos de medios continuos como la interacción de estas ondas sonoras con los cuerpos físicos.
onda sinusoidal; Variación de frecuencia; Abajo podemos ver las frecuencias más altas. El eje horizontal representa el tiempo.
Propagación del sonido
Ciertas características de los fluidos y de los sólidos influyen en la onda de sonido. Es por eso que el sonido se propaga en los sólidos y en los líquidos con mayor rapidez que en los gases. En general cuanto mayor sea la compresibilidad (1/K) del medio tanto menor es la velocidad del sonido. También la densidad es un factor importante en la velocidad de propagación, en general a mayor sea la densidad (ρ), a igualdad de todo lo demás, tanto menor es la velocidad de la propagación del sonido. La velocidad del sonido se relaciona con esas magnitudes mediante:
En los gases, la temperatura influye tanto la compresibilidad como la densidad, de tal manera que el factor de importancia suele ser la temperatura misma.
Para que el sonido se transmita se necesita que las moléculas vibren en torno a sus posiciones de equilibrio.
En algunas zonas de las moléculas de aire, al vibrar se juntan (zonas de compresion)y en otras zonas se alejan (zonas de rarefaccion),esta alteracion de las moléculas de aire es lo que produce el sonido.
Magnitudes físicas del sonido
Como todo movimiento ondulatorio, el sonido puede representarse como una suma de curvas sinusoides con un factor de amplitud, que se pueden caracterizar por las mismas magnitudes y unidades de medida que a cualquier onda de frecuencia bien definida: Longitud de onda (λ), frecuencia (f) o inversa del período (T), amplitud que indica la cantidad de energía que contiene una señal sonora) y no hay que confundir amplitud con volumen o potencia acústica. Y finalmente cuando se considera la superposición de diferentes ondas es importante la fase que representa el retardo relativo en la posición de una onda con respecto a otra.
Sin embargo, un sonido complejo cualquiera no está caracterizado por los parámetros anteriores, ya que en general un sonido cualquiera es una combinación de ondas sonoras que difieren en los cinco parámetros anteriores. La caracterización de un sonido arbitrariamente complejo implica analizar tanto la energía transmitida como la distribución de dicha energía entre las diversas ondas componentes, para ello resulta útil investigar:
Potencia acústica: El nivel de potencia acústica es la cantidad de energía radiada en forma de ondas por unidad de tiempo por una fuente determinada. La potencia acústica depende de la amplitud.
Espectro de frecuencias: que permite conocer en qué frecuencias se transmite la mayor parte de la energía.
Velocidad del sonido
El sonido tiene una velocidad de 331,5 m/s cuando: la temperatura es de 0 °C, la presión atmosférica es de 1 atm (nivel del mar) y se presenta una humedad relativa del aire de 0 % (aire seco). Aunque depende muy poco de la presión del aire.
La velocidad del sonido depende del tipo de material. Cuando el sonido se desplaza en los sólidos tiene mayor velocidad que en los líquidos, y en los líquidos es más veloz que en los gases. Esto se debe a que las partículas en los sólidos están más cercanas.
U.S. Navy F/A-18 Avión rompiendo la barrera del sonido.
Comportamiento de las ondas de sonido a diferentes velocidades
La velocidad del sonido se puede calcular en relación a la temperatura de la siguiente manera:
Donde:
, es la temperatura en grados Celsius.
Si la temperatura ambiente es de 15 °C, la velocidad de propagación del sonido es 340 m/s (1224 km/h ). Este valor corresponde a 1 MACH.
Reverberación
La reverberación es la suma total de las reflexiones del sonido que llegan al lugar del oyente en diferentes momentos del tiempo. Auditivamente se caracteriza por una prolongación, a modo de "colasonora", que se añade al sonido original. La duración y la coloración tímbrica de esta cola dependen de: La distancia entre el oyente y la fuente sonora; la naturaleza de las superficies que reflejan el sonido. En situaciones naturales hablamos de sonido directo para referirnos al sonido que se transmite directamente desde la fuente sonora hasta nosotros (o hasta el mecanismo de captación que tengamos). Por otra parte, el sonido reflejado es el que percibimos después de que haya rebotado en las superficies que delimitan el recinto acústico, o en los objetos que se encuentren en su trayectoria. Evidentemente, la trayectoria del sonido reflejado siempre será más larga que la del sonido directo, de manera que -temporalmente- escuchamos primero el sonido seco, y unos instantes más tarde escucharemos las primeras reflexiones (early reflections); a medida que transcurre el tiempo las reflexiones que nos llegan son cada vez de menor intensidad, hasta que desparecen. Nuestra sensación, no obstante, no es la de escuchar sonidos separados, ya que el cerebro los integra en un único precepto, siempre que las reflexiones lleguen con una separación menor de unos 50 milisegundos. Esto es lo que se denomina efecto Haas o efecto de precedencia.ariel12
Fisiología del sonido
El aparato auditivo
Los sonidos son percibidos a través del aparato auditivo que recibe las ondas sonoras, que son convertidas en movimientos de los osteocillos óticos y percibidas en el oído interno que a su vez las transmite mediante el sistema nervioso al cerebro. Esta habilidad se tiene incluso antes de nacer[cita requerida].
La voz humana
La espectrografía de la voz humana revela su rico contenido armónico.
La voz humana se produce por la vibración de las cuerdas vocales, lo cual genera una onda sonora que es combinación de varias frecuencias y sus correspondientes armónicos. La cavidad buco-nasal sirve para crear ondas cuasiestacionarias por lo que ciertas frecuencias denominadas formantes. Cada segmento de sonido del habla viene caracterizado por un cierto espectro de frecuencias o distribución de la energía sonora en las diferentes frecuencias. El oído humano es capaz de identificar diferentes formantes de dicho sonido y percibir cada sonido con formantes diferentes como cualitativamente diferentes, eso es lo que permite por ejemplo distinguir dos vocales. Típicamente el primer formante, el de frecuencia más baja está relacionada con la abertura de la vocal que en última instancia está relacionada con la frecuencia de las ondas estacionarias que vibran verticalmente en la cavidad. El segundo formante está relacionado con la vibración el la dirección horizontal y está relacionado con si la vocal es anterior, central o posterior.
La voz masculina tiene un tono fundamental de entre 100 y 200 Hz, mientras que la voz femenina es más aguda, típicamente está entre 150 y 300 Hz. Las voces infantiles son aún más agudas. Sin el filtrado por resonancia que produce la cavidad buco nasal nuestras emisiones sonoras no tendrían la claridad necesaria para ser audibles. Ese proceso de filtrado es precisamente lo que permite generar los diversos formantes de cada unidad segmental del habla.
Sonidos del habla
Las lenguas humanas usan segmentos homogéneos reconocibles de unas decenas de milisegundos de duración, que componen los sonidos del habla, técnicamente llamados fonos. Lingüísticamente no todas las diferencias acústicas son relevantes, por ejemplo las mujeres y los niños tienen en general tonos más agudos, por lo que todos los sonidos que producen tienen en promedio una frecuencia fundamental y unos armónicos más altos.
Los hablantes competentes de una lengua aprenden a "clasificar" diferentes sonidos cualitativamente similares en clases de equivalencia de rasgos relevantes. Esas clases de equivalencia reconocidas por los hablantes son los constructos mentales que llamamos fonemas. La mayoría de lenguas naturales tiene unas pocas decenas de fonemas distintivos, a pesar de que las variaciones acústicas de los fonos y sonidos son enormes.
Resonancia
Es el fenómeno que se produce cuando los cuerpos vibran con la misma frecuencia, uno de los cuales se puso a vibrar al recibir las frecuencias del otro. Para entender el fenómeno de la resonancia existe un ejemplo muy sencillo, Supóngase que se tiene un tubo con agua y muy cerca de él (sin éstos en contacto) tenemos un diapasón, si golpeamos el diapasón con un metal, mientras echan agua en el tubo, cuando el agua alcance determinada altura el sonido será mas fuerte; esto se debe a que la columna de agua contenida en el tubo se pone a vibrar con la misma frecuencia que la que tiene el diapasón, lo que evidencia por qué las frecuencias se refuerzan y en consecuencia aumenta la intensidad del sonido. Un ejemplo podria ser el efecto de afinar las cuerdas de la guitarra, puesto que al afinar, lo que se hace es igualar las frecuencias, es decir poner en resnancia el sonido de las cuerdas.
El sonido en la música
El sonido, en combinación con el silencio, es la materia prima de la música. En música los sonidos se califican en categorías como: largos y cortos, fuertes y débiles, agudos y graves, agradables y desagradables. El sonido ha estado siempre presente en la vida cotidiana del hombre. A lo largo de la historia el ser humano ha inventado una serie de reglas para ordenarlo hasta construir algún tipo de lenguaje musical.
Propiedades
Altura: Indica si el sonido es grave o agudo, que depende de la frecuencia:
vibración lenta = baja frecuencia = sonido grave
vibración rápida = alta frecuencia = sonido agudo.
Duración: es el tiempo durante el cual se mantiene dicho sonido. Los únicos instrumentos acústicos que pueden mantener los sonidos el tiempo que quieran, son los de cuerda con arco como el violín por ejemplo, y los de viento (utilizando la respiración circular ó continua); pero por lo general, los de viento dependen de la capacidad pulmonar, y los de cuerda según el cambio del arco producido por el ejecutante.
Timbre o color : la voz propia de cada instrumento que distingue entre los sonidos y los ruidos
Intensidad o fuerza o potencia : lo fuerte o suave de un sonido :
1. fortissimo o muy fuerte 2. forte o fuerte 3. mezzoforte o medio fuerte 4. mezzopiano o medio suave 5. piano o suave 6. pianísimo o muy suave
Características o cualidades del sonido
Las cuatro cualidades básicas del sonido son:
La altura: viene determinada por la frecuencia fundamental de las ondas sonoras (es lo que permite distinguir entre sonidos graves, agudos o medios) medida en ciclos por segundo o hercios (Hz).
Para que los humanos podamos percibir un sonido, éste debe estar comprendido entre el rango de audición de 20 y 20.000 Hz. Por debajo de este rango tenemos los infrasonidos y por encima los ultrasonidos. A esto se le denomina rango de frecuencia audible. Cuanta más edad se tiene, este rango va reduciéndose tanto en graves como en agudos.
Véase también: Tono y altura (música)
La intensidad: es la cantidad de energía acústica que contiene un sonido. La intensidad viene determinada por la potencia, que a su vez está determinada por la amplitud y nos permite distinguir si el sonido es fuerte o débil.
Los sonidos que percibimos deben superar el umbral auditivo (0 dB) y no llegar al umbral de dolor (140 dB). Esta cualidad la medimos con el sonómetro y los resultados se expresan en decibelios (dB) en honor al científico e inventor Alexander Graham Bell.
En música se escriben así: ``piano pianissimo´´(ppp) mas suave que pianissimo, ``Pianissimo´´ (pp) Muy suave, ``Piano´´ (p) suave, ``Mezzo Piano´´ (mp) medio suave, ``Mezzo Forte´´ (mf) medio fuerte, ``Forte´´ (f) fuerte, ``Fortissimo´´ (ff) Muy fuerte, ``forte fortissimo´(fff) mas fuerte que fortissimo.
El timbre: es la cualidad que confiere al sonido los armónicos que acompañan a la frecuencia fundamental.
Esta cualidad es la que permite distinguir dos sonidos, por ejemplo, entre la misma nota (tono) con igual intensidad producida por dos instrumentos musicales distintos. Se define como la calidad del sonido. cada cuerpo sonoro vibra de una forma distinta. Las diferencias se dan no solamente por la naturaleza del cuerpo sonoro (madera, metal, piel tensada, etc), sino también por la manera de hacerlo sonar (golpear, frotar, rascar). Una misma nota suena distinta si la toca una flauta, un violín, una trompeta… cada instrumento tiene un timbre que lo identifica o lo diferencia de los demás. Con la voz sucede lo mismo. El sonido dado por un hombre, una mujer, un/a niño/a tienen distinto timbre. El timbre nos permitirá distinguir si la voz es áspera,dulce, ronca o aterciopelada. También influye en la variación del timbre la calidad del material que se utilice. Así pues, el sonido será claro, sordo, agradable o molesto.
La duración: es la cualidad que determina el tiempo de vibración de un objeto. Por ejemplo, podemos escuchar sonidos largos, cortos, muy cortos, etc. Es el tiempo durante el cual se mantiene un sonido, está determinada por la longitud, que indica el tamaño de una onda, que es la distancia entre el principio y el final de una onda completa (ciclo); según esto podemos decir que por duración los sonidos pueden ser largos o cortos.
CUALIDAD
CARACTERÍSTICA
RANGO
Altura
Frecuencia de onda
Agudo, medio, grave
Duración
Longitud de onda o tiempo de vibración
Largo o corto
Intensidad
Amplitud de onda
Fuerte, débil o suave
Timbre
Armónicos de onda o forma de la onda
Fuente emisora del sonido
CONVERCION, A/D-D/A
CONVERSIÓN AD – DA
El procesado digital de las señales ofrece varias ventajas destacables frente al analógico. Entre dichas
ventajas cabe destacar la facilidad de implementación de sistemas digitales frente a sistemas analógicos,
pensemos por ejemplo en las diferencias de implementación entre un amplificador analógico y uno digital.
Por otro lado, los sistemas digitales son mucho más inmunes a los problemas físicos de los componentes
como son las derivas térmicas y las tolerancias de los componentes discretos. Los sistemas digitales son más
fácilmente adaptables a nuevas necesidades, es decir, en los mismos se pueden cambiar las especificaciones
sin necesidad de cambiar el propio sistema, pensemos por ejemplo en un filtro digital. Otra característica
destacable de los sistemas digitales es que en los mismos los datos se pueden almacenar con mayor facilidad
(memorias) y precisión siendo así mismo más fácil su recuperación.
La tendencia al uso de sistemas digitales también es evidente en el área de la instrumentación electrónica
pero el hecho de que la mayoría de las variables que pretendemos medir sean analógicas hace necesario su
transformación a un formato digital que pueda ser usado por el sistema digital en sí. En realidad, lo que
necesitamos es un interfaz capaz de asignar un código digital a cada valor de la variable analógica que
previamente se ha convertido en una señal eléctrica. A este interfaz es lo que denominamos convertidor
analógico digital (CAD). Cuando un dato en el sistema digital necesita ser usado como una señal analógica
usamos otro interfaz similar que denominamos convertidor digital analógico (CDA).
Muestreo
El muestreo es el proceso por el cual se obtienen una serie de muestras a partir de una señal analógica. El
tiempo de adquisición entre muestras se denomina periodo de muestreo y su inversa es la frecuencia de
muestreo. En la mayor parte de las aplicaciones el tiempo de muestro es constante.
Una serie de muestras discretas puede crear ambigüedad a la hora de determinar la señal analógica que
produjo dicha serie. Para ilustrar esta afirmación, puede observarse la Ilustración 1 en la que la serie discreta
de muestras podría haber sido obtenida de cualquiera de las señales analógicas mostradas. Este ejemplo pone
de manifiesto el hecho evidente de que en el proceso de muestreo se pierde información.
En relación al muestreo existe un importante teorema expuesto por Nyquist. Conocido como “Teorema de
muestreo de Nyquist” y se puede enunciar como: “Si la frecuencia más alta de una señal ( ) a x t es
Fmax = B y la señal se muestrea a una velocidad max 2 2 s F> F = B entonces ( ) a x t se puede recuperar
totalmente a partir de sus muestras mediante cierta función de interpolación”.
La interpretación práctica del teorema de muestreo es que es necesario muestrear a una velocidad
determinada relacionada con el ancho de banda de la señal para poder reconstruir sin ambigüedades la señal
original, es decir, para que la pérdida de información producida por el muestreo no sea significativa.
En la práctica, la frecuencia de Nyquist no es suficiente para obtener resultados satisfactorios en muchos
casos por lo que es recomendable muestrear al menos a 5 veces la mayor frecuencia de la señal analógica para evitar problemas
Cuantificación
Cuantificar una señal eléctrica continua consiste en representar sus valores en forma de una serie finita de N niveles de
tensión, corrientes o estados diferentes. El sistema que realiza esta función recibe el nombre de cuantificador.
Ilustración 2. Función de transferencia de un cuantificador uniforme y su error de cuantificación
La Ilustración 2 muestra la característica transferencial estática ideal de un cuantificador de N niveles ó estados , el error de
cuantificación y su densidad de probabilidad.
El margen de variación de la señal de entrada h para el cual la salida no cambia de valor o de estado se denomina intervalo de
cuantificación y es equivalente a la resolución del cuantificador. Para un cuantificador en el que el número de niveles o
estados a la salida sea N, la resolución se expresa como:
1 1
1
RESOLUCION
N N
= »
-
Aunque como habitualmente ocurre que N es lo suficientemente grande, la resolución se puede aproximar por la inversa del
propio número de estados como se indica en la expresión anterior.
Si la resolución es la misma para todo el margen estático de entrada del cuantificador de fondo de escala FS se trata entonces
de un cuantificador uniforme para el cual el intervalo de cuantificación viene dado Inherente a la función del cuantificador existe un error de cuantificación cuya amplitud o valor máximo se corresponde con la
mitad del valor del intervalo de cuantificación (h/2). En la cuantificación uniforme este error varia con la señal de entrada en
forma de un diente de sierra de periodo h por lo que, si N es grande y la señal de entrada se encuentra dentro del margen de
medida del cuantificador, la función densidad de probabilidad p(e) tiene forma rectangular de amplitud 1/h en todo el intervalo
[–h/2, h/2] como puede verse en la Ilustración 2.
Si expresamos N como una potencia de 2, es decir, N = 2n (donde n es el número de bits del código binario directo con el que
se representa a N), podemos conocer la resolución del cuantificador uniforme en función de dicho número de bits así como el
intervalo de cuantificación mediante las expresiones:
1
2n 2n
RESOLUCION = h = FS
Cuando la salida ‘y’ es expresada en términos de estados y estos son representados por N códigos digitales diferentes la
diferencia entre los códigos correspondientes a dos estados adyacentes es la unidad. Esta diferencia, expresada en términos de
la señal de entrada x, que generalmente es una tensión, se denomina peso del LSB (Least Significant Bit) y es equivalente a h.
En la Tabla 1 se presenta el valor de la resolución aproximada en función del número de estados. Obsérvese que a medida que
crece n la resolución es m
Codificación
Una vez que se tienen los distintos niveles de tensión ó corriente ó estados mediante el cuantificador tenemos que codificar
cada uno de esos niveles para representarlos unívocamente con los mismos. La codificación dependerá de la aplicación a
desarrollar así como del hardware disponible.
La generalidad de los procesadores digitales interpretan códigos binarios en los que las cifras usadas son solo dos, el 0 y el 1
(Bit de Binary Digit). Los códigos binarios que se usan para representar los estados correspondientes a señales unipolares se
denominan códigos binarios unipolares y los que representan señales bipolares códigos binarios bipolares.
Conversión DA
La conversión digital-analógica es un procedimiento mediante el cual un código de entrada es transformado en una señal
(habitualmente de tensión) unipolar o bipolar de salida mediante una correspondencia entre 2n combinaciones binarias
posibles de entrada y 2n valores de la señal discretas de salida obtenidas a partir de una señal de referencia.
Característica estática del CDA
parámetros que caracterizan estáticamente un CDA son:
· Resolución: Dos códigos de entrada adyacentes se diferencian en 1 LSB, siendo esta la resolución que puede
expresarse en términos del peso porcentual respecto al fondo de escala como:
[%] 1 100 1 100
2n 1 2n RESOLUCION = »
-
· Ganancia: La ganancia de un CDA o sensibilidad es la pendiente de su característica transferencial estática. Es la
constante que relaciona el valor de la tensón de salida correspondiente al código de plena escala con la magnitud de la
referencia de tensión utilizada en el circuito. En la mayoría de las aplicaciones esta ganancia se ajusta a la unidad.
· Exactitud: La exactitud de un CDA es la diferencia entre el valor que se obtiene a la salida para un determinado
código a la entrada y el valor esperado teóricamente. Se expresa en términos de LSB.
Característica dinámica del CDA
La Ilustración 4 muestra la salida de un CDA de tensión Vo al producirse un cambio del código digital a su entrada. Un CDA
ideal ofrecería un cambio inmediato a su salida, mientras que en uno real este cambio se produce mediante un transitorio hasta
alcanzar el valor de salida correspondiente al código digital de entrada final.
La respuesta dinámica de los CDA se caracteriza por:
· Tiempo de establecimiento (Settling Time): Es la duración del transitorio desde que se produce el cambio del
código digital de entrada hasta que se alcanza en la salida el valor correspondiente a dicho código (valor aproximado
al mismo o comprendido en una banda expresada habitualmente en términos del LSB).
· Rapidez de cambio a la salida (Slew Rate): Es el cociente entre la tensión de salida a plena escala y el tiempo
requerido para alcanzar el valor correspondiente a plena escala partiendo del valor de cero. Se expresa en V/s.
· Frecuencia de conversión máxima: Es la frecuencia máxima a la que puede cambiar el código digital de entrada
obteniendo de manera correcta la salida corres
Conversión AD
La conversión analógica-digital es un procedimiento mediante el cual una señal analógica (habitualmente de tensión) unipolar
o bipolar es transformada en un código digital N a partir de la magnitud de la señal analógica de entrada y la de una referencia.
La conversión analógica- digital consiste en un muestreo, una cuantificación y una codificación.
7.1 Característica estática del CAD
Práctica 5. Conversión AD - DA
Instrumentación Electrónica 6 de 10
La Ilustración 6 muestra la característica de transferencia estática de un CAD, el error de cuantificación cometido y un
esquema del mismo. La característica estática recuerda a la de un cuantificador precisamente porque esta es la función
principal del CAD.
¥
Ilustración 6. a) Característica estática de un CAD; b) Error de cuantificación del CAD; c) Esquema de un CAD
La línea continua representa la función de transferencia ideal correspondiente a un CAD de infinito número de bits, mientras
que la escalonada representa la de un CAD de 3 bits que ofrece 8 códigos digitales a la salida. La entrada, en ambos casos se
representa normalizada respecto del valor de tensión máximo que en los CAD suele coincidir con Vref.
Los parámetros fundamentales que caracterizan estáticamente un CAD son los siguientes:
· Resolución: Variación necesaria en la tensión de entrada para provocar un cambio entre códigos adyacentes en el
código de salida. Para un convertidor uniforme, si N es el número total de códigos de la salida y FS el fondo de
escala, la resolución se cuantifica por:
1
RESOLUCION FS FS
N N
= »
-
· Margen de entrada: Se refiere al conjunto de valores de la entrada para los que el convertidor ofrece sus códigos de
salida. Por ejemplo 0V – 10V (unipolar); (-5V) – (+5V) (bipolar).
· Ganancia: Es la pendiente de la recta que une los puntos medios de los peldaños primero y último de la característica
transferencial estática del CAD. En el CAD ideal es la unidad.
· Exactitud absoluta: Es la diferencia entre el código que se obtiene a la salida para una determinada tensión de
entrada y el código esperado teóricamente. Se expresa en LSB o en tanto por ciento del valor a plena escala.
7.2 Característica dinámica del CAD
Un CAD no ofrece de forma inmediata el código a la salida correspondiente a la tensión de entrada. El proceso de muestreo
requiere de un determinado tiempo mientras que el de cuantificación codificación otro. Este tiempo depende de las
características propias del convertidor así como de la tecnología usada en cada una de sus partes.
Los parámetros fundamentales que caracterizan dinámicamente un CAD son los siguientes:
· Tiempo de conversión (Conversion Time): Es el tiempo necesario para que el convertidor realice una conversión, es
decir, el tiempo que transcurre desde que se empieza el muestreo de la señal de entrada y aparece el código digital
correspondiente a la salida.
· Frecuencia de conversión: Es la máxima frecuencia a la que el CAD puede ofrecer códigos estables a su salida en
modo de funcionamiento continuo.
Prácticapondiente.
El procesado digital de las señales ofrece varias ventajas destacables frente al analógico. Entre dichas
ventajas cabe destacar la facilidad de implementación de sistemas digitales frente a sistemas analógicos,
pensemos por ejemplo en las diferencias de implementación entre un amplificador analógico y uno digital.
Por otro lado, los sistemas digitales son mucho más inmunes a los problemas físicos de los componentes
como son las derivas térmicas y las tolerancias de los componentes discretos. Los sistemas digitales son más
fácilmente adaptables a nuevas necesidades, es decir, en los mismos se pueden cambiar las especificaciones
sin necesidad de cambiar el propio sistema, pensemos por ejemplo en un filtro digital. Otra característica
destacable de los sistemas digitales es que en los mismos los datos se pueden almacenar con mayor facilidad
(memorias) y precisión siendo así mismo más fácil su recuperación.
La tendencia al uso de sistemas digitales también es evidente en el área de la instrumentación electrónica
pero el hecho de que la mayoría de las variables que pretendemos medir sean analógicas hace necesario su
transformación a un formato digital que pueda ser usado por el sistema digital en sí. En realidad, lo que
necesitamos es un interfaz capaz de asignar un código digital a cada valor de la variable analógica que
previamente se ha convertido en una señal eléctrica. A este interfaz es lo que denominamos convertidor
analógico digital (CAD). Cuando un dato en el sistema digital necesita ser usado como una señal analógica
usamos otro interfaz similar que denominamos convertidor digital analógico (CDA).
Muestreo
El muestreo es el proceso por el cual se obtienen una serie de muestras a partir de una señal analógica. El
tiempo de adquisición entre muestras se denomina periodo de muestreo y su inversa es la frecuencia de
muestreo. En la mayor parte de las aplicaciones el tiempo de muestro es constante.
Una serie de muestras discretas puede crear ambigüedad a la hora de determinar la señal analógica que
produjo dicha serie. Para ilustrar esta afirmación, puede observarse la Ilustración 1 en la que la serie discreta
de muestras podría haber sido obtenida de cualquiera de las señales analógicas mostradas. Este ejemplo pone
de manifiesto el hecho evidente de que en el proceso de muestreo se pierde información.
En relación al muestreo existe un importante teorema expuesto por Nyquist. Conocido como “Teorema de
muestreo de Nyquist” y se puede enunciar como: “Si la frecuencia más alta de una señal ( ) a x t es
Fmax = B y la señal se muestrea a una velocidad max 2 2 s F> F = B entonces ( ) a x t se puede recuperar
totalmente a partir de sus muestras mediante cierta función de interpolación”.
La interpretación práctica del teorema de muestreo es que es necesario muestrear a una velocidad
determinada relacionada con el ancho de banda de la señal para poder reconstruir sin ambigüedades la señal
original, es decir, para que la pérdida de información producida por el muestreo no sea significativa.
En la práctica, la frecuencia de Nyquist no es suficiente para obtener resultados satisfactorios en muchos
casos por lo que es recomendable muestrear al menos a 5 veces la mayor frecuencia de la señal analógica para evitar problemas
Cuantificación
Cuantificar una señal eléctrica continua consiste en representar sus valores en forma de una serie finita de N niveles de
tensión, corrientes o estados diferentes. El sistema que realiza esta función recibe el nombre de cuantificador.
Ilustración 2. Función de transferencia de un cuantificador uniforme y su error de cuantificación
La Ilustración 2 muestra la característica transferencial estática ideal de un cuantificador de N niveles ó estados , el error de
cuantificación y su densidad de probabilidad.
El margen de variación de la señal de entrada h para el cual la salida no cambia de valor o de estado se denomina intervalo de
cuantificación y es equivalente a la resolución del cuantificador. Para un cuantificador en el que el número de niveles o
estados a la salida sea N, la resolución se expresa como:
1 1
1
RESOLUCION
N N
= »
-
Aunque como habitualmente ocurre que N es lo suficientemente grande, la resolución se puede aproximar por la inversa del
propio número de estados como se indica en la expresión anterior.
Si la resolución es la misma para todo el margen estático de entrada del cuantificador de fondo de escala FS se trata entonces
de un cuantificador uniforme para el cual el intervalo de cuantificación viene dado Inherente a la función del cuantificador existe un error de cuantificación cuya amplitud o valor máximo se corresponde con la
mitad del valor del intervalo de cuantificación (h/2). En la cuantificación uniforme este error varia con la señal de entrada en
forma de un diente de sierra de periodo h por lo que, si N es grande y la señal de entrada se encuentra dentro del margen de
medida del cuantificador, la función densidad de probabilidad p(e) tiene forma rectangular de amplitud 1/h en todo el intervalo
[–h/2, h/2] como puede verse en la Ilustración 2.
Si expresamos N como una potencia de 2, es decir, N = 2n (donde n es el número de bits del código binario directo con el que
se representa a N), podemos conocer la resolución del cuantificador uniforme en función de dicho número de bits así como el
intervalo de cuantificación mediante las expresiones:
1
2n 2n
RESOLUCION = h = FS
Cuando la salida ‘y’ es expresada en términos de estados y estos son representados por N códigos digitales diferentes la
diferencia entre los códigos correspondientes a dos estados adyacentes es la unidad. Esta diferencia, expresada en términos de
la señal de entrada x, que generalmente es una tensión, se denomina peso del LSB (Least Significant Bit) y es equivalente a h.
En la Tabla 1 se presenta el valor de la resolución aproximada en función del número de estados. Obsérvese que a medida que
crece n la resolución es m
Codificación
Una vez que se tienen los distintos niveles de tensión ó corriente ó estados mediante el cuantificador tenemos que codificar
cada uno de esos niveles para representarlos unívocamente con los mismos. La codificación dependerá de la aplicación a
desarrollar así como del hardware disponible.
La generalidad de los procesadores digitales interpretan códigos binarios en los que las cifras usadas son solo dos, el 0 y el 1
(Bit de Binary Digit). Los códigos binarios que se usan para representar los estados correspondientes a señales unipolares se
denominan códigos binarios unipolares y los que representan señales bipolares códigos binarios bipolares.
Conversión DA
La conversión digital-analógica es un procedimiento mediante el cual un código de entrada es transformado en una señal
(habitualmente de tensión) unipolar o bipolar de salida mediante una correspondencia entre 2n combinaciones binarias
posibles de entrada y 2n valores de la señal discretas de salida obtenidas a partir de una señal de referencia.
Característica estática del CDA
parámetros que caracterizan estáticamente un CDA son:
· Resolución: Dos códigos de entrada adyacentes se diferencian en 1 LSB, siendo esta la resolución que puede
expresarse en términos del peso porcentual respecto al fondo de escala como:
[%] 1 100 1 100
2n 1 2n RESOLUCION = »
-
· Ganancia: La ganancia de un CDA o sensibilidad es la pendiente de su característica transferencial estática. Es la
constante que relaciona el valor de la tensón de salida correspondiente al código de plena escala con la magnitud de la
referencia de tensión utilizada en el circuito. En la mayoría de las aplicaciones esta ganancia se ajusta a la unidad.
· Exactitud: La exactitud de un CDA es la diferencia entre el valor que se obtiene a la salida para un determinado
código a la entrada y el valor esperado teóricamente. Se expresa en términos de LSB.
Característica dinámica del CDA
La Ilustración 4 muestra la salida de un CDA de tensión Vo al producirse un cambio del código digital a su entrada. Un CDA
ideal ofrecería un cambio inmediato a su salida, mientras que en uno real este cambio se produce mediante un transitorio hasta
alcanzar el valor de salida correspondiente al código digital de entrada final.
La respuesta dinámica de los CDA se caracteriza por:
· Tiempo de establecimiento (Settling Time): Es la duración del transitorio desde que se produce el cambio del
código digital de entrada hasta que se alcanza en la salida el valor correspondiente a dicho código (valor aproximado
al mismo o comprendido en una banda expresada habitualmente en términos del LSB).
· Rapidez de cambio a la salida (Slew Rate): Es el cociente entre la tensión de salida a plena escala y el tiempo
requerido para alcanzar el valor correspondiente a plena escala partiendo del valor de cero. Se expresa en V/s.
· Frecuencia de conversión máxima: Es la frecuencia máxima a la que puede cambiar el código digital de entrada
obteniendo de manera correcta la salida corres
Conversión AD
La conversión analógica-digital es un procedimiento mediante el cual una señal analógica (habitualmente de tensión) unipolar
o bipolar es transformada en un código digital N a partir de la magnitud de la señal analógica de entrada y la de una referencia.
La conversión analógica- digital consiste en un muestreo, una cuantificación y una codificación.
7.1 Característica estática del CAD
Práctica 5. Conversión AD - DA
Instrumentación Electrónica 6 de 10
La Ilustración 6 muestra la característica de transferencia estática de un CAD, el error de cuantificación cometido y un
esquema del mismo. La característica estática recuerda a la de un cuantificador precisamente porque esta es la función
principal del CAD.
¥
Ilustración 6. a) Característica estática de un CAD; b) Error de cuantificación del CAD; c) Esquema de un CAD
La línea continua representa la función de transferencia ideal correspondiente a un CAD de infinito número de bits, mientras
que la escalonada representa la de un CAD de 3 bits que ofrece 8 códigos digitales a la salida. La entrada, en ambos casos se
representa normalizada respecto del valor de tensión máximo que en los CAD suele coincidir con Vref.
Los parámetros fundamentales que caracterizan estáticamente un CAD son los siguientes:
· Resolución: Variación necesaria en la tensión de entrada para provocar un cambio entre códigos adyacentes en el
código de salida. Para un convertidor uniforme, si N es el número total de códigos de la salida y FS el fondo de
escala, la resolución se cuantifica por:
1
RESOLUCION FS FS
N N
= »
-
· Margen de entrada: Se refiere al conjunto de valores de la entrada para los que el convertidor ofrece sus códigos de
salida. Por ejemplo 0V – 10V (unipolar); (-5V) – (+5V) (bipolar).
· Ganancia: Es la pendiente de la recta que une los puntos medios de los peldaños primero y último de la característica
transferencial estática del CAD. En el CAD ideal es la unidad.
· Exactitud absoluta: Es la diferencia entre el código que se obtiene a la salida para una determinada tensión de
entrada y el código esperado teóricamente. Se expresa en LSB o en tanto por ciento del valor a plena escala.
7.2 Característica dinámica del CAD
Un CAD no ofrece de forma inmediata el código a la salida correspondiente a la tensión de entrada. El proceso de muestreo
requiere de un determinado tiempo mientras que el de cuantificación codificación otro. Este tiempo depende de las
características propias del convertidor así como de la tecnología usada en cada una de sus partes.
Los parámetros fundamentales que caracterizan dinámicamente un CAD son los siguientes:
· Tiempo de conversión (Conversion Time): Es el tiempo necesario para que el convertidor realice una conversión, es
decir, el tiempo que transcurre desde que se empieza el muestreo de la señal de entrada y aparece el código digital
correspondiente a la salida.
· Frecuencia de conversión: Es la máxima frecuencia a la que el CAD puede ofrecer códigos estables a su salida en
modo de funcionamiento continuo.
Prácticapondiente.
CODECS FLAG,MP3,APL.
Free Lossless Audio Codec (FLAC)
(Códec libre de compresión de audio sin pérdida, en español) es un formato del proyecto Ogg para codificar audio sin pérdida de calidad, es decir, el archivo inicial puede ser recompuesto totalmente con la desventaja de que el archivo ocupe mucho más espacio del que se obtendría al aplicar compresión con pérdida o Lossy.
Otros formatos como MPEG-1 Layer 3 (MP3), Windows Media Audio (WMA) (excepto WMA Lossless), Advanced Audio Coding (AAC), Ogg Vorbis (OGG), Adaptive Transform Acoustic Coding ATRAC, ADPCM, etc., al comprimir el archivo pierden, de forma irreversible, parte de la información del original, a cambio de un gran ahorro de tamaño en el archivo. FLAC no ahorra tanto tamaño de archivo, rara vez baja de dejar el archivo en un tercio del tamaño original, ya que no elimina nada de la información contenida en el original. Como norma se reduce entre la mitad hasta tres cuartos según el tipo de sonido procesado.
Comparaciones
FLAC está diseñado para comprimir audio. Debido a ello, los archivos resultantes son reproducibles y útiles, además de ser más pequeños que si se hubiera aplicado directamente al archivo PCM un algoritmo de compresión estadística (como ZIP). Los algoritmos con pérdida pueden comprimir a más de 1/10 del tamaño inicial, a costa de descartar información; FLAC, en su lugar, usa la predicción lineal para convertir las muestras en series de pequeños números no correlativos (conocido como "residuos"), que se almacenan eficientemente usando la codificación Golomb-Rice (ver: "Reglas Golombinas", o "Golombianas"). Además de esto, para aprovechar los silencios (donde los valores numéricos presentan mucha repetición) usa codificación por "longitud de pista" (RLE"Run-Length Encoding") para muestras idénticas.
Nota: RLE y RAE son conceptos provenientes de la lectura mecánica de los registros, y se corresponden a las lecturas con "Velocidad Lineal Constante" (típicas de las cintas magnetofónicas), y con "Velocidad Angular Constante" (característica de los discos y gramófonos. En los lectores de CD, se puede seleccionar un método u otro de reproducción, según los parámetros de grabación. El más común es CAV, pero el CLV permite una mayor linealidad en el registro; aunque requiere el concurso de servos para controlar la velocidad angular del rotor, según se acorta el radio de la pista.
FLAC se ha convertido en uno de los formatos preferidos para la venta de música por Internet, al igual que Monkey's Audio que funciona idénticamente bien. Además es usado en el intercambio de canciones por la red, como alternativa al MP3, cuando se desea obtener una mayor reducción del tamaño que en un archivo WAV-PCM, y no perder calidad de sonido. También es el formato ideal para realizar copias de seguridad de CDs, ya que permite reproducir exactamente la información del original, y recuperarla en caso de problemas con este material.
FLAC no soporta muestras en coma flotante, sólo en coma fija. Admite cualquier resolución PCM de 4 a 32 bits, y cualquier frecuencia de muestreo (sample rate) desde 1 a 65535KHz, en incrementos de 1Hz.
Para una mayor compresión consiguiendo un mayor tiempo de codificación se puede usar el siguiente comando
flac --lax -mep -b 8192 -l 32 -r 0,16 input.wav -o output.flac
El fichero resultante puede no funcionar en reproductores normales, pero funcionara en los decodificadores software. Para evitar esto debe usar el siguiente comando:
flac --lax -mep -b 8192 -l 32 -r 0,8 input.wav -o output.flac
Tabla comparativa de funcionalidades
Habitualmente uno de los factores que más se tienen en cuenta a la hora de escoger este códec de audio es la compresión que aporta; sin embargo, dependiendo de cuál sea nuestra aplicación final y de si se consideran los medios de los que dispose el usuario, no siempre nos conviene ni el códec más rápido ni el que más comprima. En esta tabla queda demostrado que el FLAC es una buena opción en muchos de los distintos casos en los que un usuario se puede encontrar; aquí se comparan las funcionalidades más destacadas de éste con las de otros códecs de audio sin pérdidas. Los códecs analizados son los siguientes:
WavPack
Apple Lossless (ALAC)
FLAC
Monkey's
OptimFROG
Shorten
Características de los archivos
Los archivos FLAC suelen tener esta misma extensión (*.FLAC); son perfectamente reproducibles con algunos reproductores, incluso en computadoras antiguas, ya que una de las características del proyecto, es que los archivos decodifiquen en modo sencillo. Además permiten usar la función búsqueda. Estos archivos son de velocidad de bits variable, ya que no todas las partes de una misma canción son igualmente comprimibles.
Otra característica es que, como todos los formatos sin pérdida, el ratio final depende mucho del estilo musical, y de su complejidad y variedad sonora, aparte de la propia canción. Para música clásica obtiene ratios de aproximadamente 1/2; en otros estilos, como el dance o el rock, los archivos se quedan desde 2/3 hasta 4/5 del tamaño original en formato PCM. Otro factor de mucha importancia es la existencia de los silencios, ya que algunas canciones tienen varios segundos al principio o al final.
MP3
.
MPEG-1 Audio Layer 3 (MP3)
Información general
Extensión de archivo
.mp3
Tipo de MIME
audio/mpeg
Tipo de formato
Audio
Estándar(es)
ISO/IEC 11172-3, ISO/IEC 13818-3
MPEG-1 Audio Layer 3, más conocido como MP3, es un formato de audio digital comprimido con pérdida desarrollado por el Moving Picture Experts Group (MPEG) para formar parte de la versión 1 (y posteriormente ampliado en la versión 2) del formato de vídeo MPEG. El mp3 estándar es de 44 kHz y un bitrate de 128 kbps por la relación de calidad/tamaño. Su nombre es el acrónimo de MPEG-1 Audio Layer 3 y el término no se debe confundir con el de reproductor MP3. Codificación y cuantificación
La solución que propone este estándar en cuanto a la repartición de bits o ruido, se hace en un ciclo de iteración que consiste de un ciclo interno y uno externo. Examina tanto las muestras de salida del banco de filtros como el SMR (signal-to-mask ratio) proporcionado por el modelo psicoacústico, y ajusta la asignación de bits o ruido, según el esquema utilizado, para satisfacer simultáneamente los requisitos de tasa de bits y de enmascaramiento. Dichos ciclos consisten en:
Ciclo interno
El ciclo interno realiza la cuantización no-uniforme de acuerdo con el sistema de punto flotante (cada valor espectral MDCT se eleva a la potencia 3/4). El ciclo escoge un determinado intervalo de cuantización y, a los datos cuantizados, se les aplica codificación de Huffman en el siguiente bloque. El ciclo termina cuando los valores cuantizados que han sido codificados con Huffman usan menor o igual número de bits que la máxima cantidad de bits permitida.
Ciclo externo
Ahora el ciclo externo se encarga de verificar si el factor de escala para cada subbanda tiene más distorsión de la permitida (ruido en la señal codificada), comparando cada banda del factor de escala con los datos previamente calculados en el análisis psicoacústico. El ciclo externo termina cuando una de las siguientes condiciones se cumple:
Ninguna de las bandas del factor de escala tiene mucho ruido.
Si la siguiente iteración amplifica una de las bandas más de lo permitido.
Estructura de un fichero MP3
Un fichero Mp3 se constituye de diferentes frames MP3 que a su vez se componen de una cabecera Mp3 y los datos MP3. Esta secuencia de datos es la denominada "stream elemental". Cada uno de los Frames son independientes, es decir, una persona puede cortar los frames de un fichero MP3 y después reproducirlos en cualquier reproductor MP3 del Mercado. La cabecera consta de una palabra de sincronismo que es utilizada para indicar el principio de un frame válido. A continuación siguen una serie de bits que indican que el fichero analizado es un fichero Standard MPEG y si usa o no la capa 3. Después de todo esto, los valores difieren dependiendo del tipo de archivo MP3. Los rangos de valores quedan definidos en la ISO/IEC 11172-3
Monkey's Audio APE
Monkey’s Audio (Audio del Mono) es un formato de fichero para comprimir información de audio. Siendo un formato de compresión sin pérdida, Monkey’s Audio no elimina información del flujo de audio, como hacen los formatos de compresión con pérdida, por ejemplo: MP3, AAC y Vorbis.
De forma parecida a otros métodos de compresión, la principal ventaja de usar Monkey’s Audio está en la reducción de los requerimientos de ancho de banda y almacenamiento, pero en el caso de Monkey’s Audio, no hay que sacrificar la integridad de la fuente de sonido (como ocurre con el MP3). Por ejemplo, una grabación digital (como un CD) codificada a Monkey’s Audio puede ser descomprimida en una señal idéntica de la información del sonido (bit a bit, no solo desde un punto de vista subjetivo). Las fuentes de audio comprimidas con Monkey’s Audio pueden ser comprimidas a aproximadamente (variando según tipo de sonidos, género musical, presencia de silencios...) la mitad de su tamaño original.
Monkey’s Audio es adecuado para propósitos de distribución, reproducción y archivo. Además, es software propietario, pero de código abierto. Suele ser muy lento para descomprimir en dispositivos de audio portátiles, y tiene una compatibilidad limitada en plataformas que no sean Windows. Hay otras alternativas que ofrecen al usuario más libertad y soporte oficial para más plataformas como el formato FLAC.
Los archivos de Monkey’s Audio usan la extensión *.ape para el audio, y *.apl para los metadatos de la pista.
Plataformas compatibles
Oficialmente, Monkey’s Audio solo está disponible para la plataforma Microsoft Windows. Hay alguna discusión en el sitio web de Monkey’s Audio acerca del soporte oficial para los usuarios de Linux. En Mac OS X puede usarse el freeware XLD. Un desarrollador con el nombre de SuperMMX ha lanzado una versión no oficial a primeros de 2005, que además incluye complementos para permitir la reproducción usando los populares reproductores XMMS y Beep Media Player. Esta versión está desarrollada originalmente para Linux, pero ha incluido compatibilidad para Mac OS X, y para Linux en arquitecturas PowerPC y SPARC.
De todas formas, aunque la licencia permite explícitamente incluir Monkey's Audio en aplicaciones con licencia GPL, algunos mantenedores no están seguros de si la licencia está cláramente escrita, y la distribución Gentoo no incluirá programas para Monkey's Audio puesto que sus desarrolladores consideraron que no era software libre.
Hay disponible también un reproductor/descodificador/codificador multiplataforma basado en Java. Es compatible con Monkey’s Audio hasta la versión 3.99.
En plataformas de hardware, el proyecto Rockbox de firmware reproductor de código abierto es compatible con la reproducción de Monkey's Audio en la mayoría de los dispositivos con los que es compatible, pero la mayoría de dispositivos no tienen suficiente potencia de proceso (CPU) para reproducir el códec en tiempo real cuando se aplica una alta compresión en los ficheros
(Códec libre de compresión de audio sin pérdida, en español) es un formato del proyecto Ogg para codificar audio sin pérdida de calidad, es decir, el archivo inicial puede ser recompuesto totalmente con la desventaja de que el archivo ocupe mucho más espacio del que se obtendría al aplicar compresión con pérdida o Lossy.
Otros formatos como MPEG-1 Layer 3 (MP3), Windows Media Audio (WMA) (excepto WMA Lossless), Advanced Audio Coding (AAC), Ogg Vorbis (OGG), Adaptive Transform Acoustic Coding ATRAC, ADPCM, etc., al comprimir el archivo pierden, de forma irreversible, parte de la información del original, a cambio de un gran ahorro de tamaño en el archivo. FLAC no ahorra tanto tamaño de archivo, rara vez baja de dejar el archivo en un tercio del tamaño original, ya que no elimina nada de la información contenida en el original. Como norma se reduce entre la mitad hasta tres cuartos según el tipo de sonido procesado.
Comparaciones
FLAC está diseñado para comprimir audio. Debido a ello, los archivos resultantes son reproducibles y útiles, además de ser más pequeños que si se hubiera aplicado directamente al archivo PCM un algoritmo de compresión estadística (como ZIP). Los algoritmos con pérdida pueden comprimir a más de 1/10 del tamaño inicial, a costa de descartar información; FLAC, en su lugar, usa la predicción lineal para convertir las muestras en series de pequeños números no correlativos (conocido como "residuos"), que se almacenan eficientemente usando la codificación Golomb-Rice (ver: "Reglas Golombinas", o "Golombianas"). Además de esto, para aprovechar los silencios (donde los valores numéricos presentan mucha repetición) usa codificación por "longitud de pista" (RLE"Run-Length Encoding") para muestras idénticas.
Nota: RLE y RAE son conceptos provenientes de la lectura mecánica de los registros, y se corresponden a las lecturas con "Velocidad Lineal Constante" (típicas de las cintas magnetofónicas), y con "Velocidad Angular Constante" (característica de los discos y gramófonos. En los lectores de CD, se puede seleccionar un método u otro de reproducción, según los parámetros de grabación. El más común es CAV, pero el CLV permite una mayor linealidad en el registro; aunque requiere el concurso de servos para controlar la velocidad angular del rotor, según se acorta el radio de la pista.
FLAC se ha convertido en uno de los formatos preferidos para la venta de música por Internet, al igual que Monkey's Audio que funciona idénticamente bien. Además es usado en el intercambio de canciones por la red, como alternativa al MP3, cuando se desea obtener una mayor reducción del tamaño que en un archivo WAV-PCM, y no perder calidad de sonido. También es el formato ideal para realizar copias de seguridad de CDs, ya que permite reproducir exactamente la información del original, y recuperarla en caso de problemas con este material.
FLAC no soporta muestras en coma flotante, sólo en coma fija. Admite cualquier resolución PCM de 4 a 32 bits, y cualquier frecuencia de muestreo (sample rate) desde 1 a 65535KHz, en incrementos de 1Hz.
Para una mayor compresión consiguiendo un mayor tiempo de codificación se puede usar el siguiente comando
flac --lax -mep -b 8192 -l 32 -r 0,16 input.wav -o output.flac
El fichero resultante puede no funcionar en reproductores normales, pero funcionara en los decodificadores software. Para evitar esto debe usar el siguiente comando:
flac --lax -mep -b 8192 -l 32 -r 0,8 input.wav -o output.flac
Tabla comparativa de funcionalidades
Habitualmente uno de los factores que más se tienen en cuenta a la hora de escoger este códec de audio es la compresión que aporta; sin embargo, dependiendo de cuál sea nuestra aplicación final y de si se consideran los medios de los que dispose el usuario, no siempre nos conviene ni el códec más rápido ni el que más comprima. En esta tabla queda demostrado que el FLAC es una buena opción en muchos de los distintos casos en los que un usuario se puede encontrar; aquí se comparan las funcionalidades más destacadas de éste con las de otros códecs de audio sin pérdidas. Los códecs analizados son los siguientes:
WavPack
Apple Lossless (ALAC)
FLAC
Monkey's
OptimFROG
Shorten
Características de los archivos
Los archivos FLAC suelen tener esta misma extensión (*.FLAC); son perfectamente reproducibles con algunos reproductores, incluso en computadoras antiguas, ya que una de las características del proyecto, es que los archivos decodifiquen en modo sencillo. Además permiten usar la función búsqueda. Estos archivos son de velocidad de bits variable, ya que no todas las partes de una misma canción son igualmente comprimibles.
Otra característica es que, como todos los formatos sin pérdida, el ratio final depende mucho del estilo musical, y de su complejidad y variedad sonora, aparte de la propia canción. Para música clásica obtiene ratios de aproximadamente 1/2; en otros estilos, como el dance o el rock, los archivos se quedan desde 2/3 hasta 4/5 del tamaño original en formato PCM. Otro factor de mucha importancia es la existencia de los silencios, ya que algunas canciones tienen varios segundos al principio o al final.
MP3
.
MPEG-1 Audio Layer 3 (MP3)
Información general
Extensión de archivo
.mp3
Tipo de MIME
audio/mpeg
Tipo de formato
Audio
Estándar(es)
ISO/IEC 11172-3, ISO/IEC 13818-3
MPEG-1 Audio Layer 3, más conocido como MP3, es un formato de audio digital comprimido con pérdida desarrollado por el Moving Picture Experts Group (MPEG) para formar parte de la versión 1 (y posteriormente ampliado en la versión 2) del formato de vídeo MPEG. El mp3 estándar es de 44 kHz y un bitrate de 128 kbps por la relación de calidad/tamaño. Su nombre es el acrónimo de MPEG-1 Audio Layer 3 y el término no se debe confundir con el de reproductor MP3. Codificación y cuantificación
La solución que propone este estándar en cuanto a la repartición de bits o ruido, se hace en un ciclo de iteración que consiste de un ciclo interno y uno externo. Examina tanto las muestras de salida del banco de filtros como el SMR (signal-to-mask ratio) proporcionado por el modelo psicoacústico, y ajusta la asignación de bits o ruido, según el esquema utilizado, para satisfacer simultáneamente los requisitos de tasa de bits y de enmascaramiento. Dichos ciclos consisten en:
Ciclo interno
El ciclo interno realiza la cuantización no-uniforme de acuerdo con el sistema de punto flotante (cada valor espectral MDCT se eleva a la potencia 3/4). El ciclo escoge un determinado intervalo de cuantización y, a los datos cuantizados, se les aplica codificación de Huffman en el siguiente bloque. El ciclo termina cuando los valores cuantizados que han sido codificados con Huffman usan menor o igual número de bits que la máxima cantidad de bits permitida.
Ciclo externo
Ahora el ciclo externo se encarga de verificar si el factor de escala para cada subbanda tiene más distorsión de la permitida (ruido en la señal codificada), comparando cada banda del factor de escala con los datos previamente calculados en el análisis psicoacústico. El ciclo externo termina cuando una de las siguientes condiciones se cumple:
Ninguna de las bandas del factor de escala tiene mucho ruido.
Si la siguiente iteración amplifica una de las bandas más de lo permitido.
Estructura de un fichero MP3
Un fichero Mp3 se constituye de diferentes frames MP3 que a su vez se componen de una cabecera Mp3 y los datos MP3. Esta secuencia de datos es la denominada "stream elemental". Cada uno de los Frames son independientes, es decir, una persona puede cortar los frames de un fichero MP3 y después reproducirlos en cualquier reproductor MP3 del Mercado. La cabecera consta de una palabra de sincronismo que es utilizada para indicar el principio de un frame válido. A continuación siguen una serie de bits que indican que el fichero analizado es un fichero Standard MPEG y si usa o no la capa 3. Después de todo esto, los valores difieren dependiendo del tipo de archivo MP3. Los rangos de valores quedan definidos en la ISO/IEC 11172-3
Monkey's Audio APE
Monkey’s Audio (Audio del Mono) es un formato de fichero para comprimir información de audio. Siendo un formato de compresión sin pérdida, Monkey’s Audio no elimina información del flujo de audio, como hacen los formatos de compresión con pérdida, por ejemplo: MP3, AAC y Vorbis.
De forma parecida a otros métodos de compresión, la principal ventaja de usar Monkey’s Audio está en la reducción de los requerimientos de ancho de banda y almacenamiento, pero en el caso de Monkey’s Audio, no hay que sacrificar la integridad de la fuente de sonido (como ocurre con el MP3). Por ejemplo, una grabación digital (como un CD) codificada a Monkey’s Audio puede ser descomprimida en una señal idéntica de la información del sonido (bit a bit, no solo desde un punto de vista subjetivo). Las fuentes de audio comprimidas con Monkey’s Audio pueden ser comprimidas a aproximadamente (variando según tipo de sonidos, género musical, presencia de silencios...) la mitad de su tamaño original.
Monkey’s Audio es adecuado para propósitos de distribución, reproducción y archivo. Además, es software propietario, pero de código abierto. Suele ser muy lento para descomprimir en dispositivos de audio portátiles, y tiene una compatibilidad limitada en plataformas que no sean Windows. Hay otras alternativas que ofrecen al usuario más libertad y soporte oficial para más plataformas como el formato FLAC.
Los archivos de Monkey’s Audio usan la extensión *.ape para el audio, y *.apl para los metadatos de la pista.
Plataformas compatibles
Oficialmente, Monkey’s Audio solo está disponible para la plataforma Microsoft Windows. Hay alguna discusión en el sitio web de Monkey’s Audio acerca del soporte oficial para los usuarios de Linux. En Mac OS X puede usarse el freeware XLD. Un desarrollador con el nombre de SuperMMX ha lanzado una versión no oficial a primeros de 2005, que además incluye complementos para permitir la reproducción usando los populares reproductores XMMS y Beep Media Player. Esta versión está desarrollada originalmente para Linux, pero ha incluido compatibilidad para Mac OS X, y para Linux en arquitecturas PowerPC y SPARC.
De todas formas, aunque la licencia permite explícitamente incluir Monkey's Audio en aplicaciones con licencia GPL, algunos mantenedores no están seguros de si la licencia está cláramente escrita, y la distribución Gentoo no incluirá programas para Monkey's Audio puesto que sus desarrolladores consideraron que no era software libre.
Hay disponible también un reproductor/descodificador/codificador multiplataforma basado en Java. Es compatible con Monkey’s Audio hasta la versión 3.99.
En plataformas de hardware, el proyecto Rockbox de firmware reproductor de código abierto es compatible con la reproducción de Monkey's Audio en la mayoría de los dispositivos con los que es compatible, pero la mayoría de dispositivos no tienen suficiente potencia de proceso (CPU) para reproducir el códec en tiempo real cuando se aplica una alta compresión en los ficheros
domingo, 18 de octubre de 2009
COMO INSTALAR PROGRAMAS EN LINUX
Como instalar programas en Linux
Introduccion
Compilar Programas
Instalar programas en Linux
Paquetes
Gestión de Paquetes o cómo se instala un programa (o paquete)
Dependencias
Sistemas de instalación de paquetes
Aprender más
Enlaces
Esta explicación puede que le sirva a los usuarios muy nuevos en Linux para entender mejor cómo se trabaja para instalar programas en Linux, y qué estás haciendo exactamente con "./configure, make, make install", por ejemplo:
Lo que sigue es un fragmento de la respuesta que envié a un mail recibimos en una lista de la que soy suscriptor, a continuación la cuestión planteada, y después la explicación.
"intente compilar algunos programas, primero desempaquetando los archivos, y al teclear el comando ./configure, me pedía unas librerías algo de qt-mt >=3 2, y ahí quede, pero no me quise desilusionar, debo admitir que estoy acostumbradisimo a los .exe de windows, doble click y listo a aceptar todo nomás, a lo que quiero llegar es algún tutorial o algo parecido, porque tampoco se como ejecuto un programa instalado, etc."
Compilar programas
Lo que vos hiciste, al descomprimir el archivo que mencionás, es seguir un viejo mal consejo acerca de lo "fácil" que es instalar programas en Linux, solo haciendo "./configure, make, make install". Esto serefiere en realidad a compilar un programa desde el código fuente, algo sencillo si sos un programador (especializado en entornos Unix/Linux), pero no tan sencillo ni tan fácil de hacer si sos un usuario querecién empieza en esto de Linux. Seguí leyendo y fijáte como es esto de instalar programas en Linux en realidad.
Instalar programas en Linux
Comenzamos por la distro que usás, y a partir de ahí vemos como se hace en cada una en particular. Hablando en general para que tengas una idea de cómo se instalan programas en Linux, la cosa es así:
Cuando instalás Windows, se instala solo el sistema operativo y algunas aplicaciones y herramientas; después tenés que instalar los programas. Esto ocurre porque Windows es propietario y los programas también;hay que comprarlos para poder usarlos. En Linux, cuando instalamos el S.O. también instalamos los programas que vamos a usar, en general la mayoría de las distribuciones modernas (Fedora, SuSE, Mandriva, etc.), brindan gran control sobre QUE se instala o no, aunque algunas prefieren lo contrario e instalan un conjunto preestablecido de programas, solo permitiendo una selección básica (oficina, multimedia, internet, etc.).
Poder instalar el sistema de ese modo es la causa de que existan distribuciones que ocupen tantos CDs, ya que los programas (el 90% de los disponibles para Linux), son libres y se puede distribuirlos libremente (incluso aunque vendas los CDs). Linux en sí, el S.O. (kernel) más los drivers, ocupa poco más de 150 mb (a veces más, a veces menos), si sumás a esto componentes indispensables para el uso diario, como la interfaz gráfica y el soporte para impresoras, estaríamos en unos 250 mb aprox.; si a esto querés sumar un buen entorno de escritorio para correr, KDE por ejemplo, podemos llegar fácilmente a los 400/600 mb. (KDE se puede instalar modularmente según lo que necesites).
Paquetes
Claro que instalar programas al instalar el sistema operativo no es la costumbre, y Linux no te limita en absoluto, podés instalar/desinstalar programas ya habiendo instalado el sistema.
Cuando en Linux hablamos de instalar un programa, en general nos referimos a "instalar un paquete", lo que implica que los programas vienen empaquetados en un archivo comprimido.
Una aclaración, en Linux al igual que en Windows, los programas soportan bibliotecas de funciones compartidas. Es decir que si programamos en C++ tenemos ciertas librerías, si lo hacemos en C, otra, y así. Por esto los programas, las aplicaciones en sí, suelen ser bastante pequeñas en comparación con las de Windows (Kbs en Linux, Mbs en Win).
Gestión de Paquetes o cómo se instala un programa (o paquete)
Ok, viendo que tenemos varios miles de programas (comprimidos), disponibles en los CDs de Mandriva Linux (son 3 en la versión Download, y más en otras), por ejemplo. Surge de ahí la necesidad de tener algún tipo de sistema para gestionar la instalación/desinstalación rápida y eficaz de tanto software. No solo se trata de instalar, también hay que tener la posibilidad de buscarlos por nombre, leer alguna descripción acerca de qué hace el programa, buscar dentro de estas descripciones, etc.
Bueno, para ello existen aplicaciones específicas, que en general, si vamos a la línea de comando, reducen la tarea de instalar un programa a esto:
programa-instalador programa-a-instalar
Claro que asumimos muchas cosas, sabemos el nombre del programa, qué hace, etc. También existen interfaces gráficas, para por ejemplo realizar grandes instalaciones/desinstalaciones de modo amigable (instalar 30 programas de una sola vez, simplemente tildando checkboxes al lado del nombre, por ej.), y para lo más importante, buscar información (así podés buscar, por ejemplo, si querés algún visor de imágenes al estilo ACDsee, la cadena "visor" o "imágenes"), también podés buscar un programa que ya conocés por su nombre, para ver si está entre tus CDs (y no tener que insertar y buscar en 7 CDs a lo largo de miles de nombres).
uf, era complicado eh, :-) en realidad esto es más extensivo como para explicarte bien nomás. Los procedimientos y el usar los programas de instalación se reducen a muy poca cosa en cuanto a complejidad (algo que usás muy seguido tiene que ser simple y rápido).
Dependencias
Algo de lo que vas a escuchar seguido es el tema de las "dependencias", que tiene que ver con lo que te expliqué antes sobre las librerías compartidas y también se aplica entre programas, por ejemplo:
El programa A depende del programa B, y este a su vez de C (cada uno a su vez puede depender una o más librerías). Es decir que si quisieras instalar "A", tendrían que instalar todos los demás. Esto no sería simple.
Bueno, así eran antes las cosas, cuando no había distribuciones de entre 1 y 11 CDs (Debian Woody ocupa 11 CDs en total, aunque solo es indispensable el CD 1).
Así antes teníamos (tenemos aún en realidad), el comando "rpm" para instalar paquetes, el más extendido entre las distros, lo usan RedHat, Mandriva Linux, SuSE, etc., Las distros basadas en Debian tenían/tienen el "dpkg", etc.
Esos comando permiten instalar paquetes como "A" individualmente, pero no resuelven las dependencias, para hacer esto se crearon los sistemas de instalación de paquetes, lo que mencioné al principio: algo que permite hacer simples las cosas.
Sistemas de instalación de paquetes
Estos sistemas de instalación de paquetes son lo que se usa en realidad al instalar algo hoy en día, hay varios y depende de cada distro cual usa, los más comunes son:
apt-get Debian, Fedora, etc., otras distros basada en ella.
yum Fedora, otras distros basada en ella.
urpmi Mandriva Linux, otras distros basada en ella. Aunque en Mandriva se pueden instalar ademas de urpmi, tambien: apt, yum y smart.
Cabe aclarar que los paquetes tienen extensiones: rpm, deb:- los ".rpm" también son para yum y urpmi (no .debs); - apt-get tiene dos versione
Introduccion
Compilar Programas
Instalar programas en Linux
Paquetes
Gestión de Paquetes o cómo se instala un programa (o paquete)
Dependencias
Sistemas de instalación de paquetes
Aprender más
Enlaces
Esta explicación puede que le sirva a los usuarios muy nuevos en Linux para entender mejor cómo se trabaja para instalar programas en Linux, y qué estás haciendo exactamente con "./configure, make, make install", por ejemplo:
Lo que sigue es un fragmento de la respuesta que envié a un mail recibimos en una lista de la que soy suscriptor, a continuación la cuestión planteada, y después la explicación.
"intente compilar algunos programas, primero desempaquetando los archivos, y al teclear el comando ./configure, me pedía unas librerías algo de qt-mt >=3 2, y ahí quede, pero no me quise desilusionar, debo admitir que estoy acostumbradisimo a los .exe de windows, doble click y listo a aceptar todo nomás, a lo que quiero llegar es algún tutorial o algo parecido, porque tampoco se como ejecuto un programa instalado, etc."
Compilar programas
Lo que vos hiciste, al descomprimir el archivo que mencionás, es seguir un viejo mal consejo acerca de lo "fácil" que es instalar programas en Linux, solo haciendo "./configure, make, make install". Esto serefiere en realidad a compilar un programa desde el código fuente, algo sencillo si sos un programador (especializado en entornos Unix/Linux), pero no tan sencillo ni tan fácil de hacer si sos un usuario querecién empieza en esto de Linux. Seguí leyendo y fijáte como es esto de instalar programas en Linux en realidad.
Instalar programas en Linux
Comenzamos por la distro que usás, y a partir de ahí vemos como se hace en cada una en particular. Hablando en general para que tengas una idea de cómo se instalan programas en Linux, la cosa es así:
Cuando instalás Windows, se instala solo el sistema operativo y algunas aplicaciones y herramientas; después tenés que instalar los programas. Esto ocurre porque Windows es propietario y los programas también;hay que comprarlos para poder usarlos. En Linux, cuando instalamos el S.O. también instalamos los programas que vamos a usar, en general la mayoría de las distribuciones modernas (Fedora, SuSE, Mandriva, etc.), brindan gran control sobre QUE se instala o no, aunque algunas prefieren lo contrario e instalan un conjunto preestablecido de programas, solo permitiendo una selección básica (oficina, multimedia, internet, etc.).
Poder instalar el sistema de ese modo es la causa de que existan distribuciones que ocupen tantos CDs, ya que los programas (el 90% de los disponibles para Linux), son libres y se puede distribuirlos libremente (incluso aunque vendas los CDs). Linux en sí, el S.O. (kernel) más los drivers, ocupa poco más de 150 mb (a veces más, a veces menos), si sumás a esto componentes indispensables para el uso diario, como la interfaz gráfica y el soporte para impresoras, estaríamos en unos 250 mb aprox.; si a esto querés sumar un buen entorno de escritorio para correr, KDE por ejemplo, podemos llegar fácilmente a los 400/600 mb. (KDE se puede instalar modularmente según lo que necesites).
Paquetes
Claro que instalar programas al instalar el sistema operativo no es la costumbre, y Linux no te limita en absoluto, podés instalar/desinstalar programas ya habiendo instalado el sistema.
Cuando en Linux hablamos de instalar un programa, en general nos referimos a "instalar un paquete", lo que implica que los programas vienen empaquetados en un archivo comprimido.
Una aclaración, en Linux al igual que en Windows, los programas soportan bibliotecas de funciones compartidas. Es decir que si programamos en C++ tenemos ciertas librerías, si lo hacemos en C, otra, y así. Por esto los programas, las aplicaciones en sí, suelen ser bastante pequeñas en comparación con las de Windows (Kbs en Linux, Mbs en Win).
Gestión de Paquetes o cómo se instala un programa (o paquete)
Ok, viendo que tenemos varios miles de programas (comprimidos), disponibles en los CDs de Mandriva Linux (son 3 en la versión Download, y más en otras), por ejemplo. Surge de ahí la necesidad de tener algún tipo de sistema para gestionar la instalación/desinstalación rápida y eficaz de tanto software. No solo se trata de instalar, también hay que tener la posibilidad de buscarlos por nombre, leer alguna descripción acerca de qué hace el programa, buscar dentro de estas descripciones, etc.
Bueno, para ello existen aplicaciones específicas, que en general, si vamos a la línea de comando, reducen la tarea de instalar un programa a esto:
programa-instalador programa-a-instalar
Claro que asumimos muchas cosas, sabemos el nombre del programa, qué hace, etc. También existen interfaces gráficas, para por ejemplo realizar grandes instalaciones/desinstalaciones de modo amigable (instalar 30 programas de una sola vez, simplemente tildando checkboxes al lado del nombre, por ej.), y para lo más importante, buscar información (así podés buscar, por ejemplo, si querés algún visor de imágenes al estilo ACDsee, la cadena "visor" o "imágenes"), también podés buscar un programa que ya conocés por su nombre, para ver si está entre tus CDs (y no tener que insertar y buscar en 7 CDs a lo largo de miles de nombres).
uf, era complicado eh, :-) en realidad esto es más extensivo como para explicarte bien nomás. Los procedimientos y el usar los programas de instalación se reducen a muy poca cosa en cuanto a complejidad (algo que usás muy seguido tiene que ser simple y rápido).
Dependencias
Algo de lo que vas a escuchar seguido es el tema de las "dependencias", que tiene que ver con lo que te expliqué antes sobre las librerías compartidas y también se aplica entre programas, por ejemplo:
El programa A depende del programa B, y este a su vez de C (cada uno a su vez puede depender una o más librerías). Es decir que si quisieras instalar "A", tendrían que instalar todos los demás. Esto no sería simple.
Bueno, así eran antes las cosas, cuando no había distribuciones de entre 1 y 11 CDs (Debian Woody ocupa 11 CDs en total, aunque solo es indispensable el CD 1).
Así antes teníamos (tenemos aún en realidad), el comando "rpm" para instalar paquetes, el más extendido entre las distros, lo usan RedHat, Mandriva Linux, SuSE, etc., Las distros basadas en Debian tenían/tienen el "dpkg", etc.
Esos comando permiten instalar paquetes como "A" individualmente, pero no resuelven las dependencias, para hacer esto se crearon los sistemas de instalación de paquetes, lo que mencioné al principio: algo que permite hacer simples las cosas.
Sistemas de instalación de paquetes
Estos sistemas de instalación de paquetes son lo que se usa en realidad al instalar algo hoy en día, hay varios y depende de cada distro cual usa, los más comunes son:
apt-get Debian, Fedora, etc., otras distros basada en ella.
yum Fedora, otras distros basada en ella.
urpmi Mandriva Linux, otras distros basada en ella. Aunque en Mandriva se pueden instalar ademas de urpmi, tambien: apt, yum y smart.
Cabe aclarar que los paquetes tienen extensiones: rpm, deb:- los ".rpm" también son para yum y urpmi (no .debs); - apt-get tiene dos versione

Instalacion de Linux y Particiones del Disco
INSTALACION DE LINUX:
· Su máquina ya tiene Windows instalado, y está instalando Linux como segundo sistema operativo, y
· Desea conservar el cargador de arranque (boot loader) de Windows (NTLDR) en el MBR (Master Boot Record). Esto le permite seguir arrancando Windows sin problemas. He oido que Windows 2000/Windows XP o algún software anti-virus pueden causar problemas si el MBR no contiene el Windows boot loader
Puede usar tanto GRUB como LILO para tener arranque dual Windows 2000/Windows XP y Linux. Ambos trabajan bien, pero por lo que he leido, GRUB necesita menos mantenimiento, pues LILO requiere que se instale el boot loader (ejecutando /sbin/lilo) cada vez que se recostruye el Kernel o se hacen cambios en /etc/lilo.conf.
Configuración del Arranque Dual (Dual-Boot)
A continuación están los pasos para poner a funcionar el dual-boot con GRUB; descubrí cómo hacerlo estudiando un procedimiento similar para LILO. Ya verifiqué que esto funciona en Windows 2000 y Windows XP, y debería en Windows NT (todos los 3 Sistemas operativos usan la misma arquitectura de carga del arranque -boot loading-).
1. Instale GRUB en el primer sector de la partición /boot. ¡NO LO INSTALE EN EL MBR! La ubicación de la partición /boot en el disco duro es importante para evitar posibles problemas con el BIOS 1024-cylinder limit.
Si está realizando la instalación de RedHat, en la pantalla de "Boot Loader Installation":
o Seleccione "Use GRUB as the boot loader"
o Seleccione Install Boot Loader record on "...First sector of boot partition".
o Luego de instalar Red Hat, reinicie en Linux. Si no tiene un disco de arranque, trate de arrancar en el modo rescue ( booting in linux rescue mode)
Si ya tiene Linux instalado:
o Ejecute el siguiente comando (p.ejm. suponiendo que /boot es /dev/hda2):grub-install /dev/hda2.
Si no sabe cuál partición contiene a /boot, ejecute el comando df y revise la salida.
o Edite /etc/grub.conf y asegúrese de que hay una entrada para su versión de Windows. Para referencia, aquí hay una copia de mi archivo /etc/grub.conf.
2. Determine cuál partición contiene la patición /boot ejecutando el comando df. Verá una salida como esta:
3. Filesystem 1k-blocks Used Available Use% Mounted on
4. /dev/hda3 8665372 1639580 6585612 20% /
5. /dev/hda2 46636 5959 38269 14% /boot
6. /dev/hda6 513776 189504 324272 37% /osshare
7. none 256624 0 256624 0% /dev/shm
Allí se puede ver que /boot está en/dev/hda2.
8. Haga una copia del Sector de Arranque de Linux en un diskette o en una partición FAT32. Llamaremos a esta copia linux.bin.
Para copiarlo a diskette:
o Monte la unidad de diskette si no está montada (suponemos que /mnt/floppy existe): mount -t msdos /dev/fd0 /mnt/floppy
o Ejecute el siguiente comando: dd if=/dev/hda2 of=/mnt/floppy/linux.bin bs=512 count=1
Reemplace la ruta del parámetro if= (input file) con la partición apropiada tomada del paso anterior. P. ejm.: /dev/hda2.
Para copiarlo en una partición FAT32 (vfat):
o Monte la partición FAT32 si aún no está. Si no está listada en la salida del df, es porque no está montada. Revisen steps 3a-3c for mounting a FAT32 partition en el HOWTO de compartir particiones ("Share Partitions HOWTO").
o Ejecute el siguiente comando: dd if=/dev/hda2 of=/osshare/linux.bin bs=512 count=1
Reemplace la ruta para el parámetro if= (input file-archivo de entrada-) con la partición apropiada tomada del paso anterior. P. ejm., confgúrelo if= como/dev/hda2. Sustituya la ruta del parámetro of= (output file-archivo de salida-) con lo que sea apropiado para su sistema. El ejemplo (of=/osshare/linux.bin) es para copiarlo en una partición FAT32 llamada osshare.
9. Reinicie en Windows
10. Copie el archivo linux.bin en C:\
11. Ejecute el Bloc de Notas (notepad) y edite el archivo C:\boot.ini. Tenga en cuenta que el archivo C:\boot.ini es un archivo oculto y del sistema (hidden system file), por lo que probablemente no se verá en el Explorador de Windows. Para editarlo pruebe: Inicio->Ejecutar y escriba: notepad C:\boot.ini. Agregue la siguiente linea al final: c:\linux.bin="Linux"
Si el sistema de archivos de C: es NTFS (no FAT32), solo podrá editar C:\boot.ini como un usuario con privilegios de Administrador.
Para hacer al C:\boot.ini escribible, puede :
o Usando Explorer:
§ Vaya a Herramientas->Opciones de Carpeta->Ver y escoja Mostrar archivos y carpetas ocultas y quite la marca a Ocultar archivos protegidos del Sistema (Recomendado).
§ Haga clic derecho sobre el archivo, entre a Properties y quite la marca a Solo lectura. Ahora puede editar el archivo.
§ Luego de editar el archivo restaure las configuraciones a su estado original.
o Usando la línea de comando:
§ Hacer escribible el archivo: C:\attrib -R -S -H boot.ini.
§ Luego de terminar la edición, retorne la configuración a su estado original: C:\attrib +R +S +H boot.ini
Para referencia, aquí hay una copia de mi archivo boot.ini .
12. Reinicie nuevamente. Ud deberá poder escoger tanto Windows como Linux. Escoger Linux dará inicio al GRUB
Posibles problemas
· Al escoger Linux en el menú de arranque, obtengo un "GRUB" congelado (o una "L" en el cao del LILO)
· Asegúrese de haber creado correctamente el archivo linux.bin con el comando dd.Si cree que ejecutó correctamente el comando, el problema puede estar en que su partición /boot está más allá del cilindro 1024 y su BIOS no lo puede alcanzar. Al reiniciar el sistema, el cargador de arranque de Windows muestra las opciones del archivo boot.ini. Cuando usted selecciona Linux, el cargador de arranque carga el archivo de 512-byte linux.bin, y luego, el BIOS trata de accesar la partición /boot para ejecutar GRUB. Algunas implementaciones del BIOS solo pueden direccionar los primeros 1024 cilindros del disco duro, lo que correspnde aunos 8 GB. Cómo corregir esto? Create your /boot partition before cylinder 1024; es decir: antes de ~8 GB.
· Si escojo Linux del menú de arranque, obtengo un mensaje de error que dice "Windows XP no pudo cargarse: El archivo hal.dll (windows/system32/) no está o está corrupta. Por favor reinstale.
· Eso usualmente se debe a un error en el archivo boot.ini.
Partición de disco
Una partición de disco
En informática, es el nombre genérico que recibe cada división presente en una sola unidad física de almacenamiento de datos. Toda partición tiene su propio sistema de archivos (formato); generalmente, casi cualquier sistema operativo interpreta, utiliza y manipula cada partición como un disco físico independiente, a pesar de que dichas particiones estén en un solo disco físico.
Vale aclarar entonces que cuando hablamos de formatear un disco estamos hablando de crear una partición que ocupe todo el espacio disponible de una unidad física de almacenamiento.
Las particiones pueden ser utilizadas para permitir a un equipo en particular tener instalado varios sistemas operativos en un mismo disco físico; vale añadir que -de hecho- algunos sistemas operativos necesitan más de una partición para funcionar, o bien, para aprovechar el rendimiento del equipo. Una partición también puede ser útil para proporcionar al usuario un espacio para almacenar copias de seguridad de tal manera que los archivos puedan quedar protegidos de un sistema de archivos roto e irrecuperable o de un formateo accidental hecho a la partición donde está el archivo original
Información general
A algún tipo de partición se le da formato mediante algún sistema de archivos como FAT, NTFS, ext3, ext2, FAT32, ReiserFS, Reiser4 u otro. En Windows, las particiones reconocidas son identificadas con una letra seguida por un signo de doble punto (p.e C:\). En sistemas basados en linux, se le asigna un archivo especial en la carpeta /dev a cada partición (p.e. hda1, sda2, etc.); el archivo recibe un nombre compuesto de tres letras seguidas de un número. Estos archivos especiales representan la partición, y gracias a estos archivos, una partición puede montarse en cualquier carpeta del sistema.
Un único disco físico puede contener hasta cuatro particiones primarias; prácticamente todo tipo de discos magnéticos y memorias flash (como pendrives) pueden particionarse. Sin embargo, para tener la posibilidad de más particiones en un solo disco, se utilizan las particiones extendidas, las cuales pueden contener un número ilimitado de particiones lógicas en su interior. Para este último tipo de particiones, no es recomendado su uso para instalar ciertos sistemas operativos, sino que son más útiles para guardar documentos o ejecutables no indispensables para el sistema. Los discos ópticos (DVD, CD) no soportan particiones
Hay que tener en cuenta que solo las particiones primarias y lógicas pueden contener un sistema de archivos propio. Las particiones extendidas solo sirven para albergar particiones lógicas. Las particiones extendidas son un tipo de partición primaria, pero a diferencia de otras particiones primarias, en éstas solo puede haber una partición extendida en todo el disco.
Representación gráfica de un disco particionado. Cada recuadro blanco representa algún sistema de archivos vacío. Los espacios en gris representan los espacios sin particionar del disco. Las particiones rodeadas por líneas moradas o violetas representan las particiones primarias. Las particiones rodeadas por bordes rojos representan la partición extendida (que es un tipo de partición primaria); y en su interior, se encuentran las particiones lógicas, rodeadas por los bordes de color verde.
Es común que los sistemas basados o similares a UNIX generalmente se usen hasta con 3 particiones: la principal, montada en el directorio raíz (/); a veces hay también una segunda que se usa para montar el directorio /home, el cual contiene las configuraciones de los usuarios, y finalmente, una tercera llamada swap, que se usa para la memoria virtual temporal. Sin embargo, 2 particiones (/, y swap); es el mínimo suficiente en estos sistemas operativos. Cabe decir además que las particiones de intercambio (swap) pueden instalarse sin problemas dentro de una partición lógica. Las particiones de intercambio, al igual que a la memoria RAM, no se les asigna un directorio; este tipo de particiones se usa para guardar ciertas réplicas de la memoria RAM, para que de esta forma la RAM tenga más espacio para las tareas en primer plano, guardando las tareas en segundo plano dentro de la partición de intercambio. Algunos sistemas tipo UNIX están diseñados para funcionar con una sola partición, sin embargo, estos diseños no son muy comunes.
Tipos de particiones
El formato o sistema de archivos de las particiones (p. ej. NTFS) no debe ser confundido con el tipo de partición (p. ej. partición primaria), ya que en realidad no tienen directamente mucho que ver. Independientemente del sistema de archivos de una partición (FAT, ext3, NTFS, etc.), existen 3 tipos diferentes de particiones:
Partición primaria: Son las divisiones crudas o primarias del disco, solo puede haber 4 de éstas o 3 primarias y una extendida. Depende de una tabla de particiones. Un disco físico completamente formateado consiste, en realidad, de una partición primaria que ocupa todo el espacio del disco y posee un sistema de archivos. A este tipo de particiones, prácticamente cualquier sistema operativo puede detectarlas y asignarles una unidad, siempre y cuando el sistema operativo reconozca su formato (sistema de archivos).
Partición extendida: Es otro tipo de partición que actúa como una partición primaria; sirve para contener infinidad de unidades lógicas en su interior. Fue ideada para romper la limitación de 4 particiones primarias en un solo disco físico. Solo puede existir una partición de este tipo por disco, y solo sirve para contener particiones lógicas. Por lo tanto, es el único tipo de partición que no soporta un sistema de archivos directamente.
Partición lógica: Ocupa una porción de la partición extendida o la totalidad de la misma, la cual se ha formateado con un tipo específico de sistema de archivos (FAT32, NTFS, ext2,...) y se le ha asignado una unidad, asi el sistema operativo reconoce las particiones lógicas o su sistema de archivos. Puede haber un máximo de 32 particiones lógicas en una partición extendida.
Particiones primarias
En los equipos PC, originales de IBM, estas particiones tradicionalmente usan una estructura llamada Tabla de particiones, que apunta al final del registro de arranque maestro (MBR, Master Boot Record). Esta tabla, que no puede contener más de 4 registros de particiones (también llamados partition descriptors), especifica para cada una su principio, final y tamaño en los diferentes modos de direccionamiento, así también como un solo número, llamado partition type, y un marcador que indica si la partición está activa o no (sólo puede haber una partición activa a la vez). El marcador se usa durante el arranque; después de que el BIOS cargue el registro de arranque maestro en la memoria y lo ejecute, el MBR de DOS comprueba la tabla de partición a su final y localiza la partición activa. Entonces carga el sector de arranque de esta partición en memoria y la ejecuta. A diferencia del registro de arranque maestro, generalmente independiente del sistema operativo, el sector de arranque está instalado junto con el sistema operativo y sabe cómo cargar el sistema ubicado en ese disco en particular.
Notar que mientras la presencia de un marcador activo se estandariza, éste normalmente no lo utiliza cualquier programa, aunque sí el gestor de arranque para que no esté obligado a cargar la partición que se marcó como activa. Algunos gestores usan esto para arrancar sistemas operativos desde particiones no activas. Por ejemplo, los gestores LILO, GRUB (muy comunes en el sistema Linux) y XOSL no buscan por encima de la tabla de partición en total; simplemente carga una segunda etapa (que puede ser contenida en el resto del cilindro 0 ó en el sistema de archivos). Después de cargar la segunda etapa se puede usar para cargar el sector de arranque desde cualquiera de las particiones del disco (así habilitando al usuario cargar el sistema desde éste), o si el gestor conoce cómo localizar el kernel (núcleo) del sistema operativo en una de las particiones y cargarlo (para propósitos de recuperación, puede permitir al usuario especificar opciones de kernel adicionales).
Particiones extendidas y lógicas
Cualquier versión del DOS puede leer sólo una partición FAT primaria en el disco duro. Esto unido al deterioro de la FAT con el uso y al aumento de tamaño de los discos movió a Microsoft a crear un esquema mejorado relativamente simple: una de las entradas de la tabla de partición principal pasó a llamarse partición extendida y recibió un número de tipo de partición especial (0x05). El campo inicio de partición tiene la ubicación del primer descriptor de la partición extendida, que a su vez tiene un campo similar con la ubicación de la siguiente; así se crea una lista enlazada de descriptores de partición. Los demás campos de una partición extendida son indefinidos, no tienen espacio asignado y no pueden usarse para almacenar datos. Las particiones iniciales de los elementos de la lista enlazada son las llamadas unidades lógicas; son espacios asignados y pueden almacenar datos. Los sistemas operativos antiguos ignoraban las particiones extendidas con número de tipo 0x05, y la contabilidad se mantenía. Este esquema reemplaza al antiguo ya que todas las particiones de un disco duro se pueden poner dentro de una sola partición extendida. Por alguna razón, Microsoft no actualizó su sistema operativo DOS para arrancar desde una partición extendida, debido a que la necesidad para particiones primarias se preservaron. Por encima de éstas todavía se habría permitido una partición FAT primaria por unidad, significando todas las otras particiones FAT primarias deben tener sus números de tipo de partición prior cambiando al arranque DOS, para que ésta sea capaz de proceder. Esta técnica, usada por varios administradores de arranque populares, se llama ocultación de la partición. Sin embargo hay que tener en cuenta una quinta partición que se puede comprimir pero no es muy recomendable
· Su máquina ya tiene Windows instalado, y está instalando Linux como segundo sistema operativo, y
· Desea conservar el cargador de arranque (boot loader) de Windows (NTLDR) en el MBR (Master Boot Record). Esto le permite seguir arrancando Windows sin problemas. He oido que Windows 2000/Windows XP o algún software anti-virus pueden causar problemas si el MBR no contiene el Windows boot loader
Puede usar tanto GRUB como LILO para tener arranque dual Windows 2000/Windows XP y Linux. Ambos trabajan bien, pero por lo que he leido, GRUB necesita menos mantenimiento, pues LILO requiere que se instale el boot loader (ejecutando /sbin/lilo) cada vez que se recostruye el Kernel o se hacen cambios en /etc/lilo.conf.
Configuración del Arranque Dual (Dual-Boot)
A continuación están los pasos para poner a funcionar el dual-boot con GRUB; descubrí cómo hacerlo estudiando un procedimiento similar para LILO. Ya verifiqué que esto funciona en Windows 2000 y Windows XP, y debería en Windows NT (todos los 3 Sistemas operativos usan la misma arquitectura de carga del arranque -boot loading-).
1. Instale GRUB en el primer sector de la partición /boot. ¡NO LO INSTALE EN EL MBR! La ubicación de la partición /boot en el disco duro es importante para evitar posibles problemas con el BIOS 1024-cylinder limit.
Si está realizando la instalación de RedHat, en la pantalla de "Boot Loader Installation":
o Seleccione "Use GRUB as the boot loader"
o Seleccione Install Boot Loader record on "...First sector of boot partition".
o Luego de instalar Red Hat, reinicie en Linux. Si no tiene un disco de arranque, trate de arrancar en el modo rescue ( booting in linux rescue mode)
Si ya tiene Linux instalado:
o Ejecute el siguiente comando (p.ejm. suponiendo que /boot es /dev/hda2):grub-install /dev/hda2.
Si no sabe cuál partición contiene a /boot, ejecute el comando df y revise la salida.
o Edite /etc/grub.conf y asegúrese de que hay una entrada para su versión de Windows. Para referencia, aquí hay una copia de mi archivo /etc/grub.conf.
2. Determine cuál partición contiene la patición /boot ejecutando el comando df. Verá una salida como esta:
3. Filesystem 1k-blocks Used Available Use% Mounted on
4. /dev/hda3 8665372 1639580 6585612 20% /
5. /dev/hda2 46636 5959 38269 14% /boot
6. /dev/hda6 513776 189504 324272 37% /osshare
7. none 256624 0 256624 0% /dev/shm
Allí se puede ver que /boot está en/dev/hda2.
8. Haga una copia del Sector de Arranque de Linux en un diskette o en una partición FAT32. Llamaremos a esta copia linux.bin.
Para copiarlo a diskette:
o Monte la unidad de diskette si no está montada (suponemos que /mnt/floppy existe): mount -t msdos /dev/fd0 /mnt/floppy
o Ejecute el siguiente comando: dd if=/dev/hda2 of=/mnt/floppy/linux.bin bs=512 count=1
Reemplace la ruta del parámetro if= (input file) con la partición apropiada tomada del paso anterior. P. ejm.: /dev/hda2.
Para copiarlo en una partición FAT32 (vfat):
o Monte la partición FAT32 si aún no está. Si no está listada en la salida del df, es porque no está montada. Revisen steps 3a-3c for mounting a FAT32 partition en el HOWTO de compartir particiones ("Share Partitions HOWTO").
o Ejecute el siguiente comando: dd if=/dev/hda2 of=/osshare/linux.bin bs=512 count=1
Reemplace la ruta para el parámetro if= (input file-archivo de entrada-) con la partición apropiada tomada del paso anterior. P. ejm., confgúrelo if= como/dev/hda2. Sustituya la ruta del parámetro of= (output file-archivo de salida-) con lo que sea apropiado para su sistema. El ejemplo (of=/osshare/linux.bin) es para copiarlo en una partición FAT32 llamada osshare.
9. Reinicie en Windows
10. Copie el archivo linux.bin en C:\
11. Ejecute el Bloc de Notas (notepad) y edite el archivo C:\boot.ini. Tenga en cuenta que el archivo C:\boot.ini es un archivo oculto y del sistema (hidden system file), por lo que probablemente no se verá en el Explorador de Windows. Para editarlo pruebe: Inicio->Ejecutar y escriba: notepad C:\boot.ini. Agregue la siguiente linea al final: c:\linux.bin="Linux"
Si el sistema de archivos de C: es NTFS (no FAT32), solo podrá editar C:\boot.ini como un usuario con privilegios de Administrador.
Para hacer al C:\boot.ini escribible, puede :
o Usando Explorer:
§ Vaya a Herramientas->Opciones de Carpeta->Ver y escoja Mostrar archivos y carpetas ocultas y quite la marca a Ocultar archivos protegidos del Sistema (Recomendado).
§ Haga clic derecho sobre el archivo, entre a Properties y quite la marca a Solo lectura. Ahora puede editar el archivo.
§ Luego de editar el archivo restaure las configuraciones a su estado original.
o Usando la línea de comando:
§ Hacer escribible el archivo: C:\attrib -R -S -H boot.ini.
§ Luego de terminar la edición, retorne la configuración a su estado original: C:\attrib +R +S +H boot.ini
Para referencia, aquí hay una copia de mi archivo boot.ini .
12. Reinicie nuevamente. Ud deberá poder escoger tanto Windows como Linux. Escoger Linux dará inicio al GRUB
Posibles problemas
· Al escoger Linux en el menú de arranque, obtengo un "GRUB" congelado (o una "L" en el cao del LILO)
· Asegúrese de haber creado correctamente el archivo linux.bin con el comando dd.Si cree que ejecutó correctamente el comando, el problema puede estar en que su partición /boot está más allá del cilindro 1024 y su BIOS no lo puede alcanzar. Al reiniciar el sistema, el cargador de arranque de Windows muestra las opciones del archivo boot.ini. Cuando usted selecciona Linux, el cargador de arranque carga el archivo de 512-byte linux.bin, y luego, el BIOS trata de accesar la partición /boot para ejecutar GRUB. Algunas implementaciones del BIOS solo pueden direccionar los primeros 1024 cilindros del disco duro, lo que correspnde aunos 8 GB. Cómo corregir esto? Create your /boot partition before cylinder 1024; es decir: antes de ~8 GB.
· Si escojo Linux del menú de arranque, obtengo un mensaje de error que dice "Windows XP no pudo cargarse: El archivo hal.dll (windows/system32/) no está o está corrupta. Por favor reinstale.
· Eso usualmente se debe a un error en el archivo boot.ini.
Partición de disco
Una partición de disco
En informática, es el nombre genérico que recibe cada división presente en una sola unidad física de almacenamiento de datos. Toda partición tiene su propio sistema de archivos (formato); generalmente, casi cualquier sistema operativo interpreta, utiliza y manipula cada partición como un disco físico independiente, a pesar de que dichas particiones estén en un solo disco físico.
Vale aclarar entonces que cuando hablamos de formatear un disco estamos hablando de crear una partición que ocupe todo el espacio disponible de una unidad física de almacenamiento.
Las particiones pueden ser utilizadas para permitir a un equipo en particular tener instalado varios sistemas operativos en un mismo disco físico; vale añadir que -de hecho- algunos sistemas operativos necesitan más de una partición para funcionar, o bien, para aprovechar el rendimiento del equipo. Una partición también puede ser útil para proporcionar al usuario un espacio para almacenar copias de seguridad de tal manera que los archivos puedan quedar protegidos de un sistema de archivos roto e irrecuperable o de un formateo accidental hecho a la partición donde está el archivo original
Información general
A algún tipo de partición se le da formato mediante algún sistema de archivos como FAT, NTFS, ext3, ext2, FAT32, ReiserFS, Reiser4 u otro. En Windows, las particiones reconocidas son identificadas con una letra seguida por un signo de doble punto (p.e C:\). En sistemas basados en linux, se le asigna un archivo especial en la carpeta /dev a cada partición (p.e. hda1, sda2, etc.); el archivo recibe un nombre compuesto de tres letras seguidas de un número. Estos archivos especiales representan la partición, y gracias a estos archivos, una partición puede montarse en cualquier carpeta del sistema.
Un único disco físico puede contener hasta cuatro particiones primarias; prácticamente todo tipo de discos magnéticos y memorias flash (como pendrives) pueden particionarse. Sin embargo, para tener la posibilidad de más particiones en un solo disco, se utilizan las particiones extendidas, las cuales pueden contener un número ilimitado de particiones lógicas en su interior. Para este último tipo de particiones, no es recomendado su uso para instalar ciertos sistemas operativos, sino que son más útiles para guardar documentos o ejecutables no indispensables para el sistema. Los discos ópticos (DVD, CD) no soportan particiones
Hay que tener en cuenta que solo las particiones primarias y lógicas pueden contener un sistema de archivos propio. Las particiones extendidas solo sirven para albergar particiones lógicas. Las particiones extendidas son un tipo de partición primaria, pero a diferencia de otras particiones primarias, en éstas solo puede haber una partición extendida en todo el disco.
Representación gráfica de un disco particionado. Cada recuadro blanco representa algún sistema de archivos vacío. Los espacios en gris representan los espacios sin particionar del disco. Las particiones rodeadas por líneas moradas o violetas representan las particiones primarias. Las particiones rodeadas por bordes rojos representan la partición extendida (que es un tipo de partición primaria); y en su interior, se encuentran las particiones lógicas, rodeadas por los bordes de color verde.
Es común que los sistemas basados o similares a UNIX generalmente se usen hasta con 3 particiones: la principal, montada en el directorio raíz (/); a veces hay también una segunda que se usa para montar el directorio /home, el cual contiene las configuraciones de los usuarios, y finalmente, una tercera llamada swap, que se usa para la memoria virtual temporal. Sin embargo, 2 particiones (/, y swap); es el mínimo suficiente en estos sistemas operativos. Cabe decir además que las particiones de intercambio (swap) pueden instalarse sin problemas dentro de una partición lógica. Las particiones de intercambio, al igual que a la memoria RAM, no se les asigna un directorio; este tipo de particiones se usa para guardar ciertas réplicas de la memoria RAM, para que de esta forma la RAM tenga más espacio para las tareas en primer plano, guardando las tareas en segundo plano dentro de la partición de intercambio. Algunos sistemas tipo UNIX están diseñados para funcionar con una sola partición, sin embargo, estos diseños no son muy comunes.
Tipos de particiones
El formato o sistema de archivos de las particiones (p. ej. NTFS) no debe ser confundido con el tipo de partición (p. ej. partición primaria), ya que en realidad no tienen directamente mucho que ver. Independientemente del sistema de archivos de una partición (FAT, ext3, NTFS, etc.), existen 3 tipos diferentes de particiones:
Partición primaria: Son las divisiones crudas o primarias del disco, solo puede haber 4 de éstas o 3 primarias y una extendida. Depende de una tabla de particiones. Un disco físico completamente formateado consiste, en realidad, de una partición primaria que ocupa todo el espacio del disco y posee un sistema de archivos. A este tipo de particiones, prácticamente cualquier sistema operativo puede detectarlas y asignarles una unidad, siempre y cuando el sistema operativo reconozca su formato (sistema de archivos).
Partición extendida: Es otro tipo de partición que actúa como una partición primaria; sirve para contener infinidad de unidades lógicas en su interior. Fue ideada para romper la limitación de 4 particiones primarias en un solo disco físico. Solo puede existir una partición de este tipo por disco, y solo sirve para contener particiones lógicas. Por lo tanto, es el único tipo de partición que no soporta un sistema de archivos directamente.
Partición lógica: Ocupa una porción de la partición extendida o la totalidad de la misma, la cual se ha formateado con un tipo específico de sistema de archivos (FAT32, NTFS, ext2,...) y se le ha asignado una unidad, asi el sistema operativo reconoce las particiones lógicas o su sistema de archivos. Puede haber un máximo de 32 particiones lógicas en una partición extendida.
Particiones primarias
En los equipos PC, originales de IBM, estas particiones tradicionalmente usan una estructura llamada Tabla de particiones, que apunta al final del registro de arranque maestro (MBR, Master Boot Record). Esta tabla, que no puede contener más de 4 registros de particiones (también llamados partition descriptors), especifica para cada una su principio, final y tamaño en los diferentes modos de direccionamiento, así también como un solo número, llamado partition type, y un marcador que indica si la partición está activa o no (sólo puede haber una partición activa a la vez). El marcador se usa durante el arranque; después de que el BIOS cargue el registro de arranque maestro en la memoria y lo ejecute, el MBR de DOS comprueba la tabla de partición a su final y localiza la partición activa. Entonces carga el sector de arranque de esta partición en memoria y la ejecuta. A diferencia del registro de arranque maestro, generalmente independiente del sistema operativo, el sector de arranque está instalado junto con el sistema operativo y sabe cómo cargar el sistema ubicado en ese disco en particular.
Notar que mientras la presencia de un marcador activo se estandariza, éste normalmente no lo utiliza cualquier programa, aunque sí el gestor de arranque para que no esté obligado a cargar la partición que se marcó como activa. Algunos gestores usan esto para arrancar sistemas operativos desde particiones no activas. Por ejemplo, los gestores LILO, GRUB (muy comunes en el sistema Linux) y XOSL no buscan por encima de la tabla de partición en total; simplemente carga una segunda etapa (que puede ser contenida en el resto del cilindro 0 ó en el sistema de archivos). Después de cargar la segunda etapa se puede usar para cargar el sector de arranque desde cualquiera de las particiones del disco (así habilitando al usuario cargar el sistema desde éste), o si el gestor conoce cómo localizar el kernel (núcleo) del sistema operativo en una de las particiones y cargarlo (para propósitos de recuperación, puede permitir al usuario especificar opciones de kernel adicionales).
Particiones extendidas y lógicas
Cualquier versión del DOS puede leer sólo una partición FAT primaria en el disco duro. Esto unido al deterioro de la FAT con el uso y al aumento de tamaño de los discos movió a Microsoft a crear un esquema mejorado relativamente simple: una de las entradas de la tabla de partición principal pasó a llamarse partición extendida y recibió un número de tipo de partición especial (0x05). El campo inicio de partición tiene la ubicación del primer descriptor de la partición extendida, que a su vez tiene un campo similar con la ubicación de la siguiente; así se crea una lista enlazada de descriptores de partición. Los demás campos de una partición extendida son indefinidos, no tienen espacio asignado y no pueden usarse para almacenar datos. Las particiones iniciales de los elementos de la lista enlazada son las llamadas unidades lógicas; son espacios asignados y pueden almacenar datos. Los sistemas operativos antiguos ignoraban las particiones extendidas con número de tipo 0x05, y la contabilidad se mantenía. Este esquema reemplaza al antiguo ya que todas las particiones de un disco duro se pueden poner dentro de una sola partición extendida. Por alguna razón, Microsoft no actualizó su sistema operativo DOS para arrancar desde una partición extendida, debido a que la necesidad para particiones primarias se preservaron. Por encima de éstas todavía se habría permitido una partición FAT primaria por unidad, significando todas las otras particiones FAT primarias deben tener sus números de tipo de partición prior cambiando al arranque DOS, para que ésta sea capaz de proceder. Esta técnica, usada por varios administradores de arranque populares, se llama ocultación de la partición. Sin embargo hay que tener en cuenta una quinta partición que se puede comprimir pero no es muy recomendable
Suscribirse a:
Entradas (Atom)









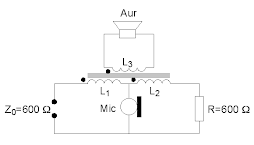



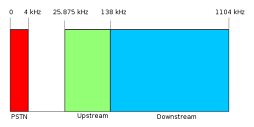









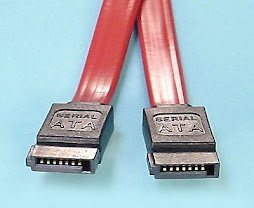



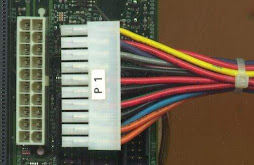




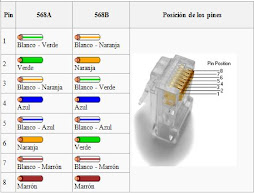






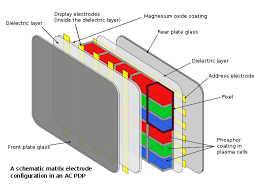
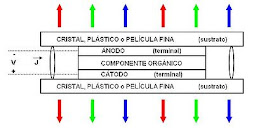
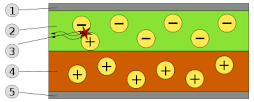
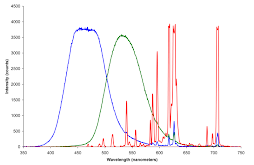
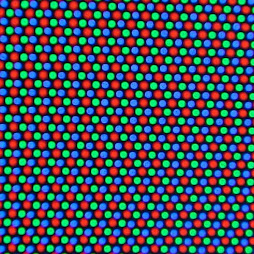























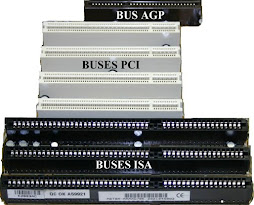



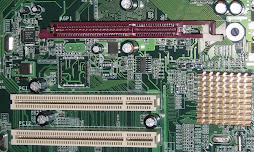
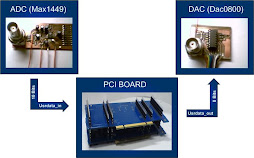
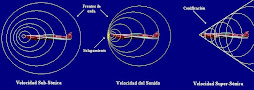
_-_filtered.jpg)
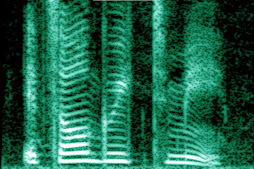
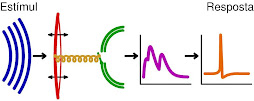
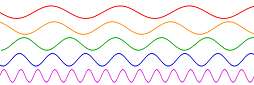





















{kind=link}
{kind=link}
_-_filtered.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}